

Route planning optimization method based on collision detection of hierarchical bounding volume for three-dimensional complex scene
A technology of hierarchical bounding boxes and collision detection, applied in image data processing, instruments, etc., can solve the problems of low planning efficiency and poor planning effect of 3D scene path planning, and achieve avoidance of collision detection and cost value evaluation, with good effect and The effect of good algorithm stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
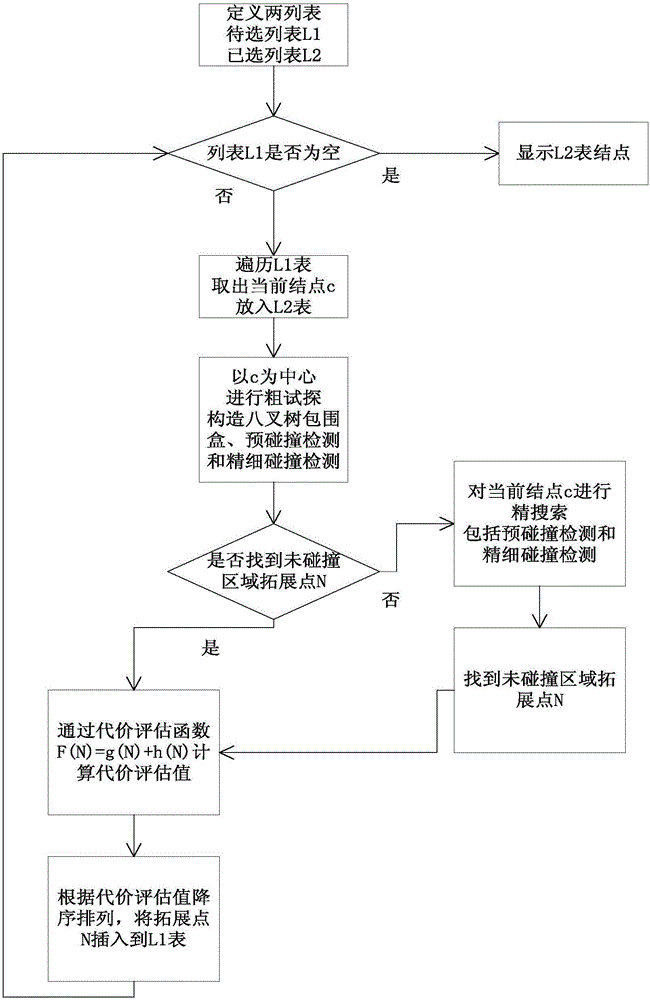
[0036] refer to figure 1 , a path planning optimization method based on hierarchical bounding box collision detection in a three-dimensional complex scene, comprising the following steps:
[0037] 1) Two lists are defined: the list to be selected L1 and the list L2 to be selected. Table L1 is used to save the nodes that have been evaluated by the evaluation function and know the cost value but the domain expansion point has not been evaluated; Table L2 is used to save the nodes in Table L1 that have been evaluated to the domain expansion point;
[0038] 2) Traverse the L1 table in turn, take out the current node c, and put it into the L2 table. Indicates to find the non-collision area expansion point for the current node c;
[0039] 3) Take the node c as the center and conduct a rough test, mainly including setting the size of the bounding box and the size of the se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More