

An Adaptive State Feedback Control Method for Compensating the Nonlinear Dead Zone of Actuator
A technology of state feedback and actuators, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as complex process and many limiting factors, and achieve strong numerical stability, simple design process, and dead zone good compensation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
[0068] Specific implementation mode one: refer to Figure 6 This embodiment is specifically described. An adaptive state feedback control method for compensating the non-linearity of the dead zone of the actuator described in this embodiment includes the following steps:
[0069] Step 1: Establish a mathematical model of the target linear system, which is a linear system to be compensated for non-linearity in the dead zone of the actuator;
[0070] Step 2: Design a state feedback control law with adaptive feed-forward at the dead zone boundary;
[0071] Step 3: Design an adaptive law for the unknown dead zone parameters;
[0072] Step 4: Solve the gain matrix of the state feedback controller and the gain matrix of the adaptive law through the stability analysis of the control system, and then obtain the state feedback controller, and use the state feedback controller to complete the non-linear compensation of the dead zone of the actuator.
[0073] Aiming at the non-linear p...
specific Embodiment approach 2
[0074] Specific embodiment 2: This embodiment is a further description of the adaptive state feedback control method for compensating the non-linearity of the dead zone of the actuator described in the specific embodiment 1. In this embodiment, in step 1, according to the target linear system characteristics, establish its mathematical model, the state space form of the mathematical model is as follows:
[0075]
[0076] where x is the state of the system, x∈R n ,
[0077] A is the system coefficient matrix, A∈R n×n ,
[0078] b is the control matrix, b∈R n ,
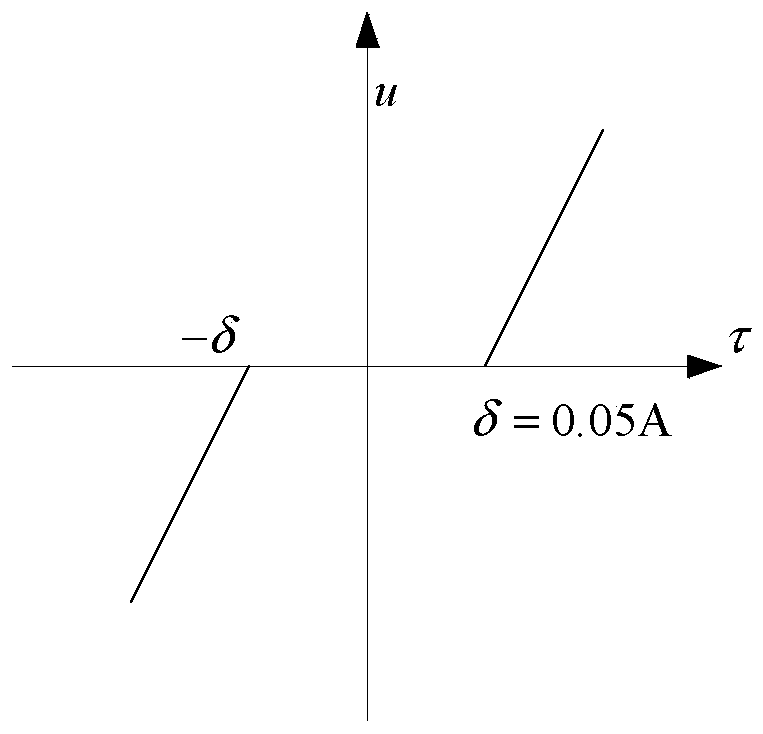
[0079] u is the control variable with dead zone nonlinearity, u∈R, written in the following form:
[0080]
[0081] Among them, δ is the nonlinear parameter of the dead zone, δ∈R and δ>0,
[0082] τ is the control instruction item when there is no dead zone, τ∈R,
[0083] R is a one-dimensional vector.
[0084] In this embodiment, the dead-zone nonlinearity is a nonlinear problem existing in the control va...
specific Embodiment approach 3
[0087] Specific embodiment three: This embodiment is a further description of the adaptive state feedback control method for compensating the non-linearity of the dead zone of the actuator described in the second specific embodiment. In this embodiment, there will be no dead zone control command item τ It is designed as the following state feedback control form:
[0088]
[0089] Among them, K is the control gain matrix, K∈R 1×n ;
[0090] is the estimated value of the nonlinear parameter in the dead zone;
[0091] Take the above state feedback control form as the state feedback control law described in step two.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More