

Multi-sensor system for inspection robot and inspection method
An inspection robot and multi-sensor technology, applied in manipulators, manufacturing tools, etc., can solve problems such as difficulty in ensuring real-time performance, large amount of data, and low GPS accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
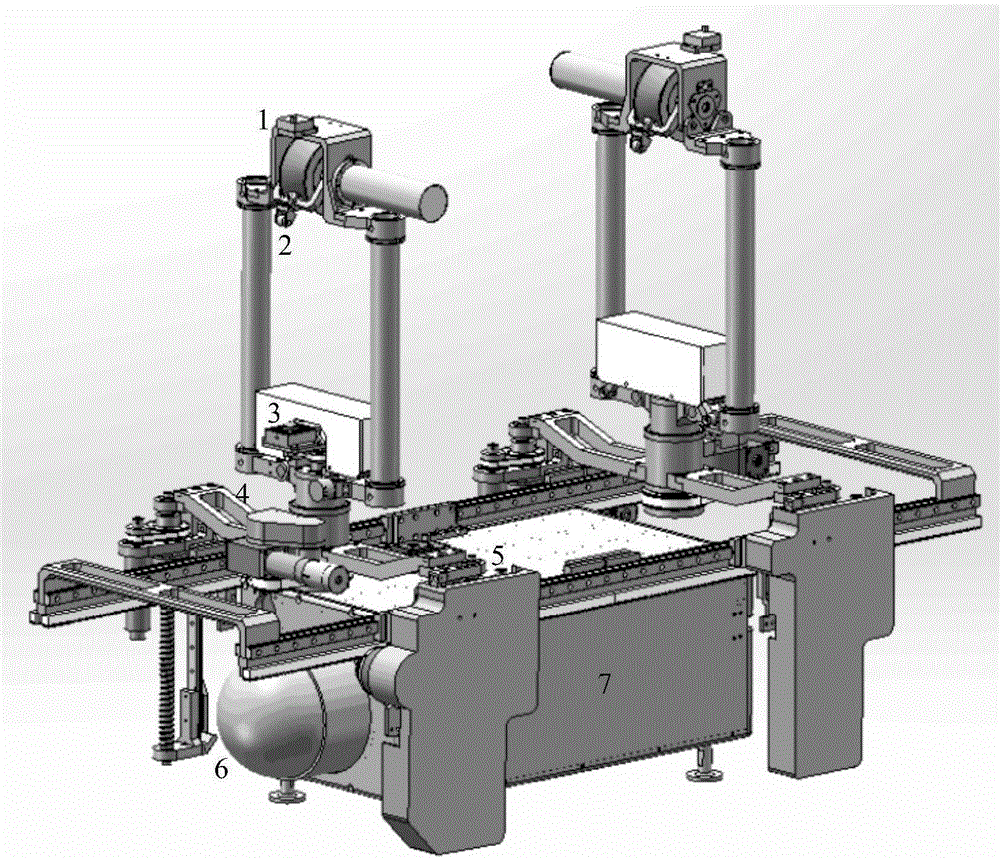
[0088] The inspection robot multi-sensor system consists of internal sensors (encoders, current sensors, temperature sensors, limit sensors, inclination sensors, battery power sensors, etc.) that feed back the state of the robot and external sensors (vision sensors and contact sensors) that perceive the environment. Encoders, current sensors, temperature sensors, and limit sensors are installed at each joint motor to feed back the state of each joint of the robot; the inclination sensor feeds back the overall inclination angle of the robot; the battery power sensor is used to detect and estimate the remaining battery power of the robot; the contact sensor consists of It consists of collision switches installed at both ends of the walking wheels; the visual sensor includes a pan-tilt camera installed at the front of the robot and a pinhole camer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More