

Biological excitation robot complete traverse path planning method based on backtracking search
A technology to stimulate robots and backtracking search, applied to biological neural network models, instruments, two-dimensional position/channel control, etc., can solve problems such as high path overlap rate in separation areas, non-optimal paths, and long waiting times
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] Below in conjunction with meeting and example the present invention will be further described.
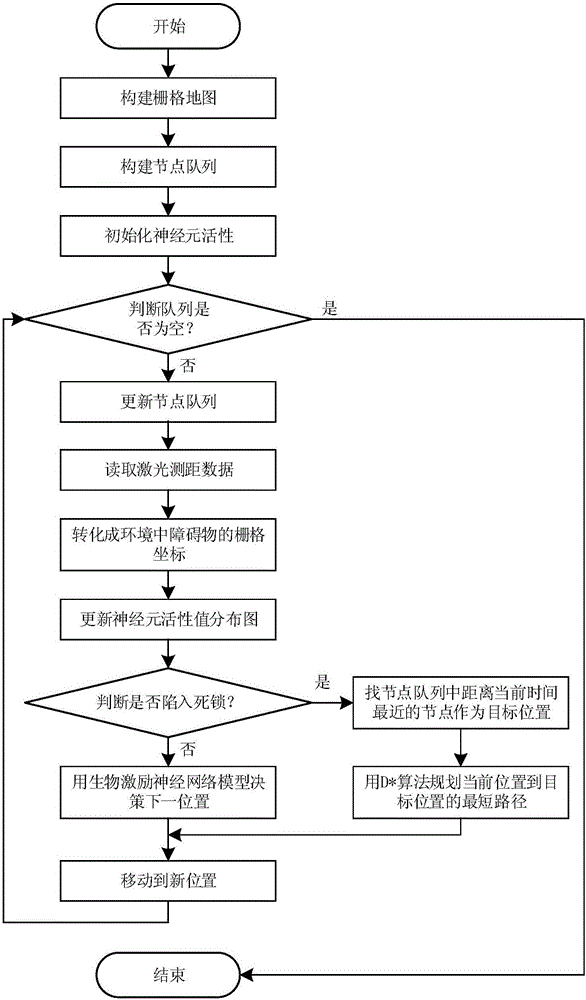
[0050] Such as figure 1 It is a flow chart of the bio-inspired complete traversal path planning method based on backtracking search of the present invention, including the following steps:
[0051] Step 1: Build a Raster Map
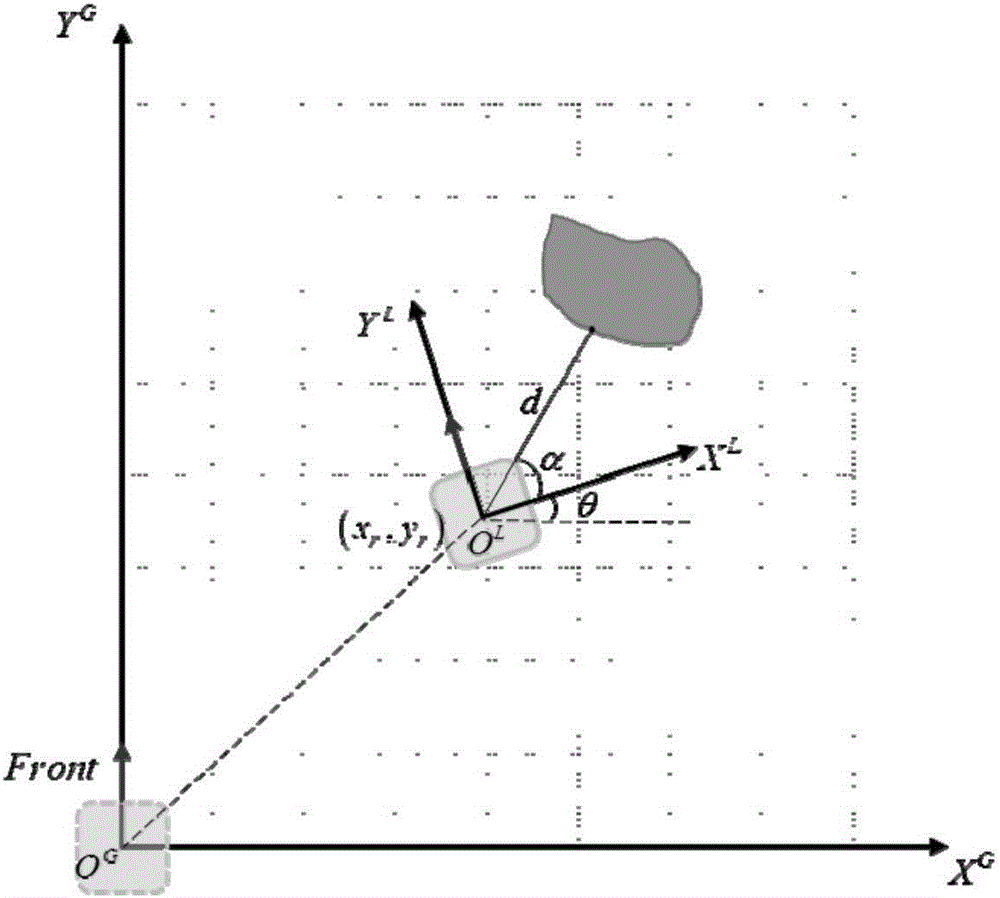
[0052] Such as figure 2 As shown, take the position of the geometric center before the robot starts to move as the origin, take the pointing of the robot before starting to move as the positive direction of the Y axis, and rotate 90 degrees clockwise as the positive direction of the X axis to establish the global coordinate system G(X G o G Y G ); taking the geometric center of the mobile robot as the origin, the moving direction of the robot is the positive direction of the Y axis, and rotating 90 degrees clockwise is the positive direction of the X axis, and the mobile coordinate system L(X L o L Y L ).
[0053] Transform the global coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More