

A general solution method of inverse kinematics for five-degree-of-freedom tandem robot
A technology of inverse kinematics and robotics, which is applied in the general solution field of inverse kinematics of five-degree-of-freedom series robots, and can solve problems such as time-consuming analysis and calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0057] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
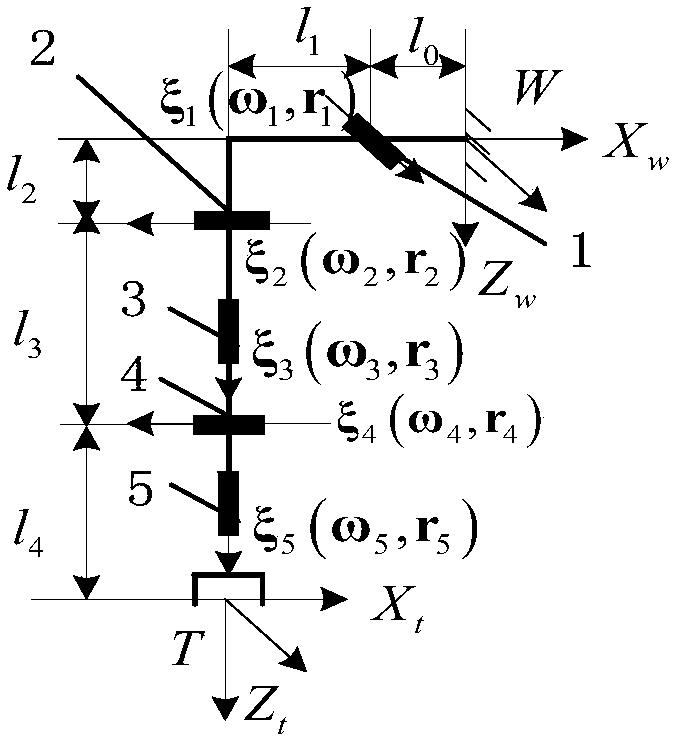
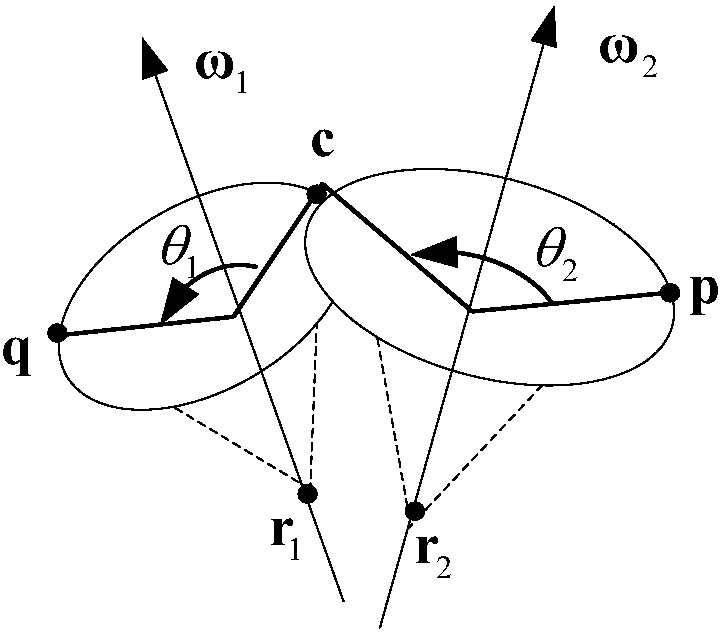
[0058] like Figure 1-2As shown, for a 5R robot, including shoulder joint axis 1, elbow joint axis 2, first wrist joint axis 3, second wrist joint axis 4, and third wrist joint axis 5, the three joint axes of the wrist intersect at a point r 3 , the axes of the shoulder and elbow joints are out of plane with each other.
[0059] According to the exponential product model, the robot kinematics equation can be expressed as:
[0060]
[0061] and
[0062]
[0063] Among them, the subscripts t and w represent the end tool coordinate system and the world coordinate system respectively, and θ is the rotation angle vector of each joint θ=[θ 1 ,...,θ 5 ], g wt (0) and g wt (θ) respectively represent the transformation relationship of the end tool coordinate system relative to the world coordinate system in the initial state and the instantan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More