Gait rehabilitation training robot and force feedback control method for robot
A technology of rehabilitation training and control method, applied in the field of medical devices, can solve the problem that a gait rehabilitation training robot cannot adjust its own motion, etc., and achieve the effects of good human-computer interaction, avoiding secondary injury and not being restricted by the venue.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with accompanying drawings, because it is convenient to understand better. The following embodiments of the present invention are only used to provide a preferred mode, but the technical features can be combined with each other on the premise of not conflicting with each other, which does not constitute a limit to the protection scope of the present invention.
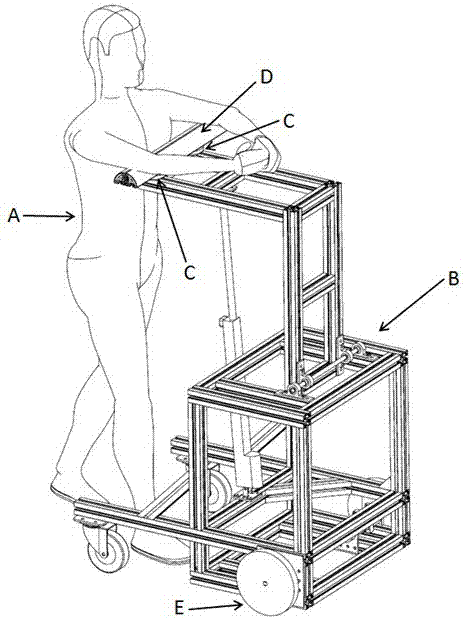
[0042] The invention uses a wearable sensor to measure the user's real-time walking speed, and uses a three-dimensional force sensor placed on the robot to measure the force between the robot and the user; then the walking speed and force are fed back to the gait rehabilitation training robot; The rehabilitation training robot should adjust its running speed according to the user's walking speed and force, so that the robot can follow the user's walking speed and provide a certain amount of traction for the user.
[0043] Taking a certain user ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com