

Pneumatic muscle upper limb assistance exoskeleton system
A pneumatic muscle and exoskeleton technology, applied in the direction of artificial arms, manipulators, program-controlled manipulators, etc., can solve the problems of low efficiency-to-mass ratio, high energy consumption, and high processing requirements, and achieve good collaboration and reduce processing costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
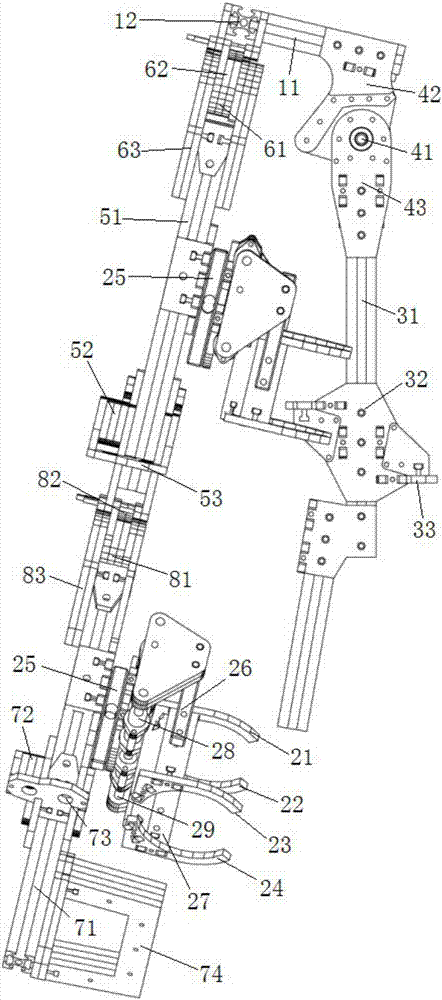
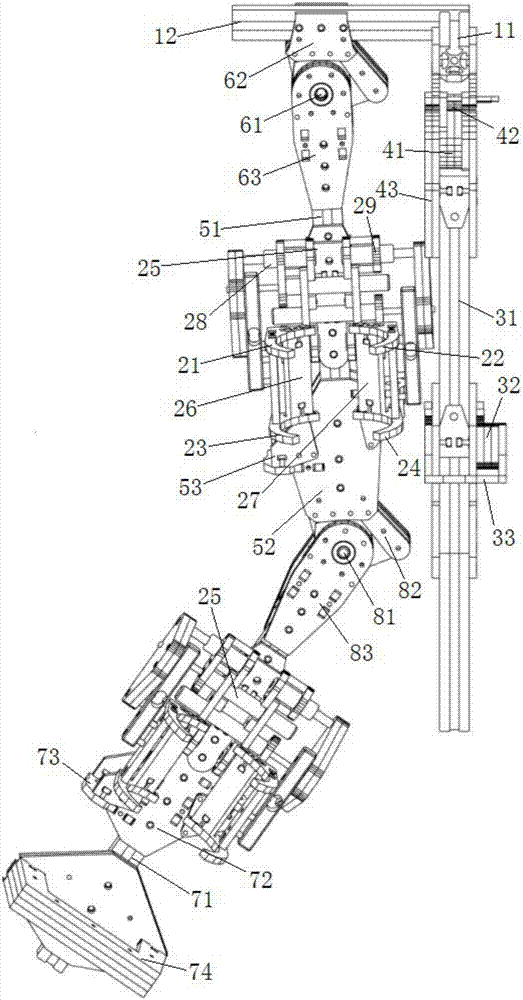
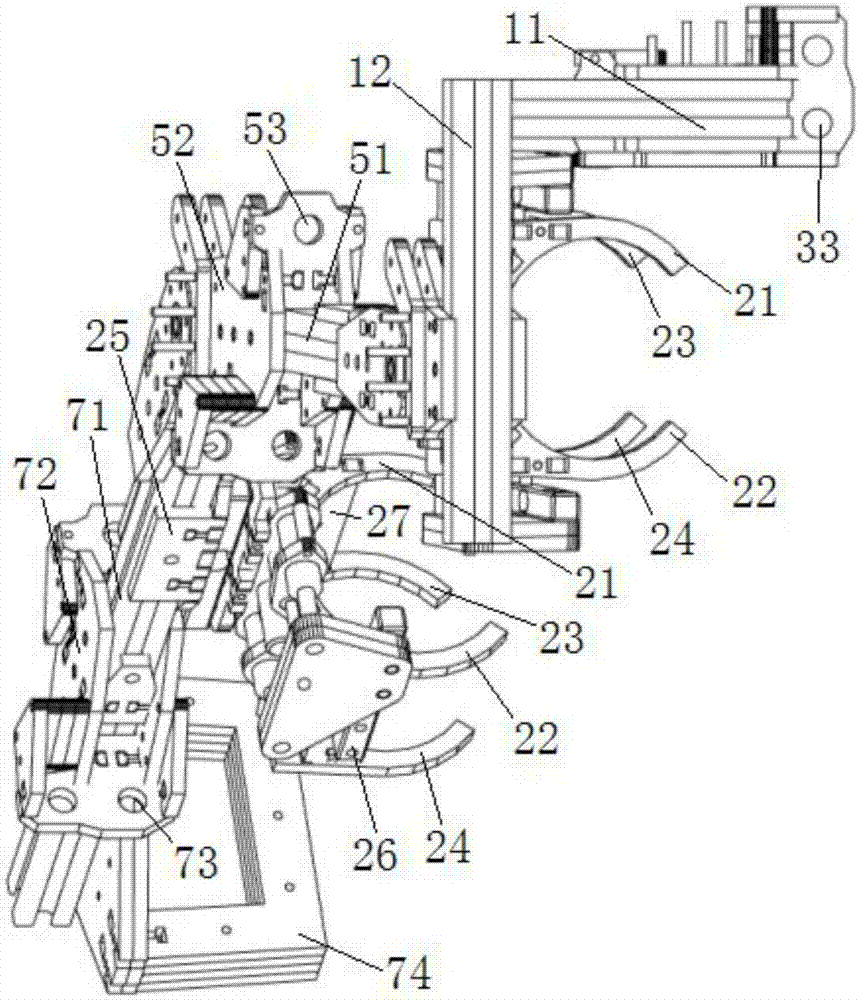
[0022] refer to Figure 1 to Figure 3 , Figure 1 to Figure 3 It is a structural schematic diagram of a specific embodiment of the present invention.
[0023] Such as Figure 1 to Figure 3 As shown, a pneumatic muscle upper limb assisted exoskeleton system includes a dorsal arm bone installed on the back of the human body and cooperating with the human body back, an upper arm bone installed on the upper arm of the human body and cooperating with the upper arm of the human body, an The forearm bone for the coordinated movement of the forearm also includes a shoulder bone for connecting the back arm bone and the upper arm bone; the shoulder bone includes a shoulder lateral skeleton 11 and a shoulder forward skeleton 12, and the shoulder bone The shoulder side frame 11 and the shoulder forward frame 12 are combined into an L-shaped structure; the shoulder side frame 11 is provided with a first joint module below the shoulder frame 12, and the shoulder forward frame 12 is provid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More