

Accurate agricultural unmanned aerial vehicle (UAV) control method based on independent start/stop, according to requirements, of working units
A working unit, precise control technology, applied in non-electric variable control, control/regulation system, three-dimensional position/channel control and other directions, can solve the problems of waste, large amount of operation error, difficult manual remote control operation, etc., to reduce work The effect of consumption, reduced flight time, and improved work quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The principles and features of the present invention will be described below with reference to the accompanying drawings. The examples cited are only used to explain the present invention and not used to limit the scope of the present invention.
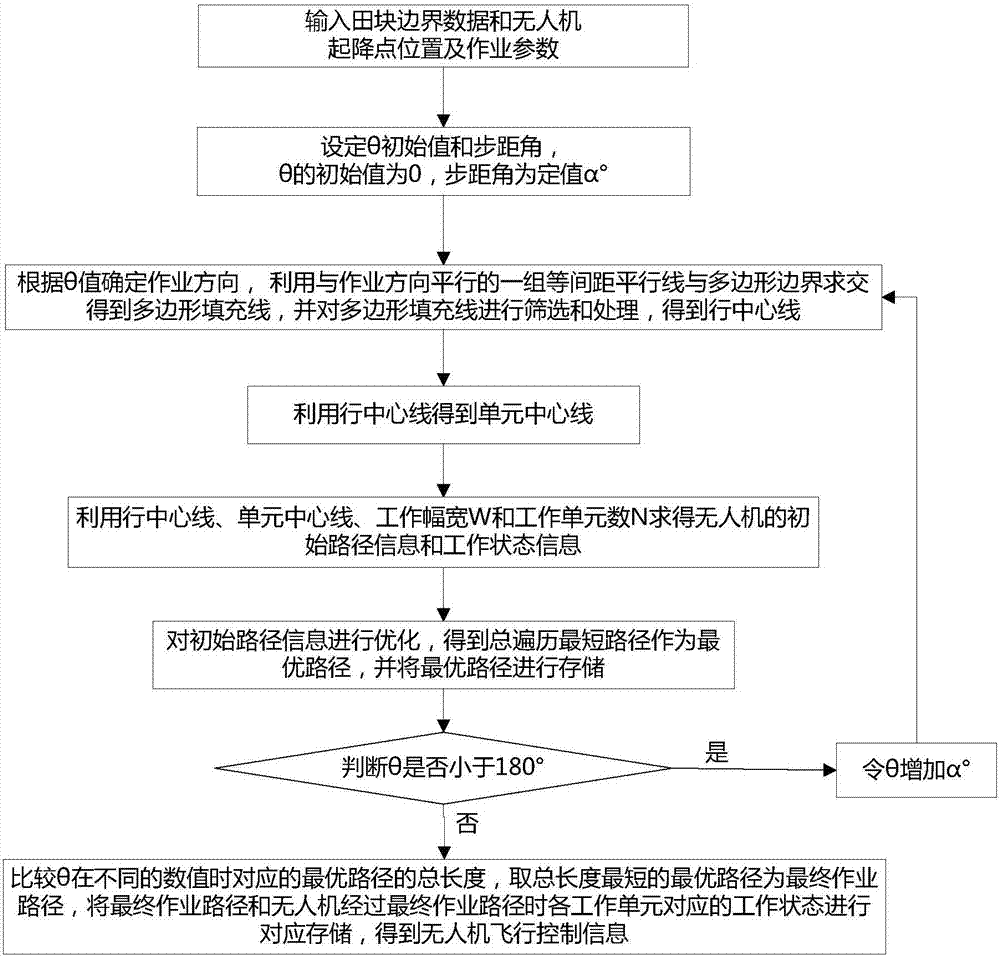
[0045] Such as figure 1 As shown, the precise control method for agricultural drones based on independent start and stop of work units on demand includes the following steps:
[0046] Step S1: Input the UAV's starting point and landing point position and the boundary data of the field to be operated, store each vertex data in turn, and connect each vertex in sequence to obtain polygon boundary data; input the UAV flight operation parameters, including the working width W and the number of work units N. In this embodiment, the starting point and landing point of the drone are at the same position, and N is 3;
[0047] Step S2: Set the initial value of θ and the step angle, where the θ is the angle between the working direction and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More