

Simultaneous localization and mapping method of monocular vision robot based on retracking strategy
A monocular vision, synchronous positioning technology, applied in instrumentation, surveying and navigation, photogrammetry/video surveying and other directions, can solve the problem of camera pose and environment cannot be estimated and modeled, and achieve the effect of improving the integrity rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below through specific embodiments and accompanying drawings.
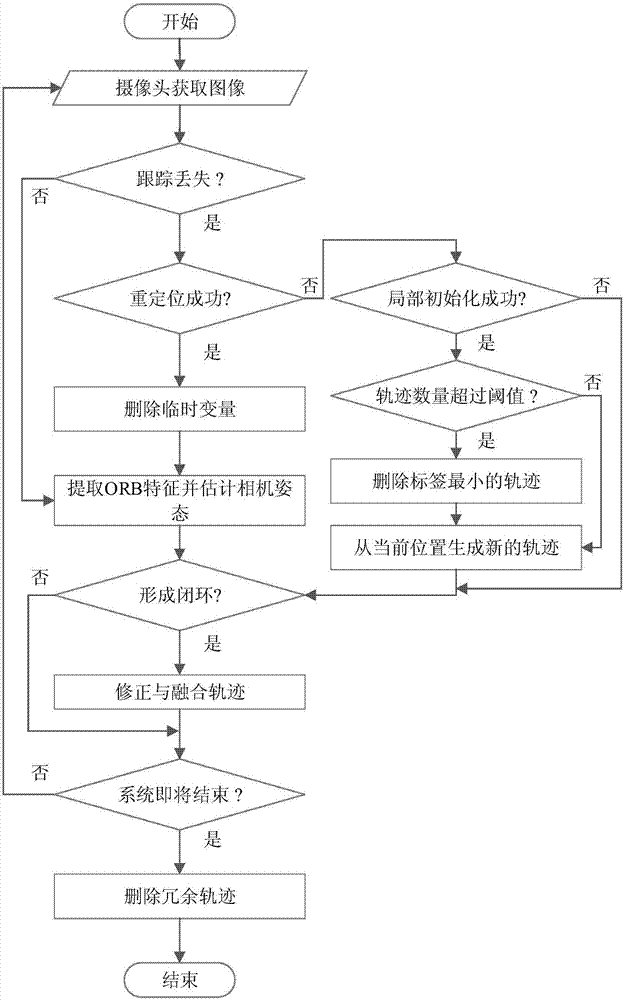
[0048] refer to figure 1 , the concrete design of the flow chart of the present invention is as follows:
[0049] 1. Input the scene image captured by the camera:
[0050]The invention processes images collected by common digital cameras at a rate of 30fps. It should be noted that since the pure rotational motion has no time difference, the depth of the feature points cannot be estimated, so the camera is required to have a certain horizontal motion when the system starts to run, and the motion speed should not be too fast, so as to complete the initialization of the system.
[0051] 2. Determine whether tracking is lost
[0052] If the camera pose cannot be estimated from the previous frame of image, it is considered that the system tracking is lost, and step 4 is performed; otherwise, step 3 is performed.
[0053] 3. Extract ORB features and estimate cam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More