

Multisensor fusion-based nmanned aerial vehicle SLAM (simultaneous localization and mapping) navigation method and system
A multi-sensor fusion and navigation method technology, applied in the field of UAV SLAM navigation method and system, can solve the problems of easy loss of feature point matching, high noise, and low recognition ability of small obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
[0065] It should be noted that all expressions using "first" and "second" in the embodiments of the present invention are to distinguish two entities with the same name but different parameters or parameters that are not the same, see "first" and "second" It is only for the convenience of expression, and should not be construed as a limitation on the embodiments of the present invention, which will not be described one by one in the subsequent embodiments.
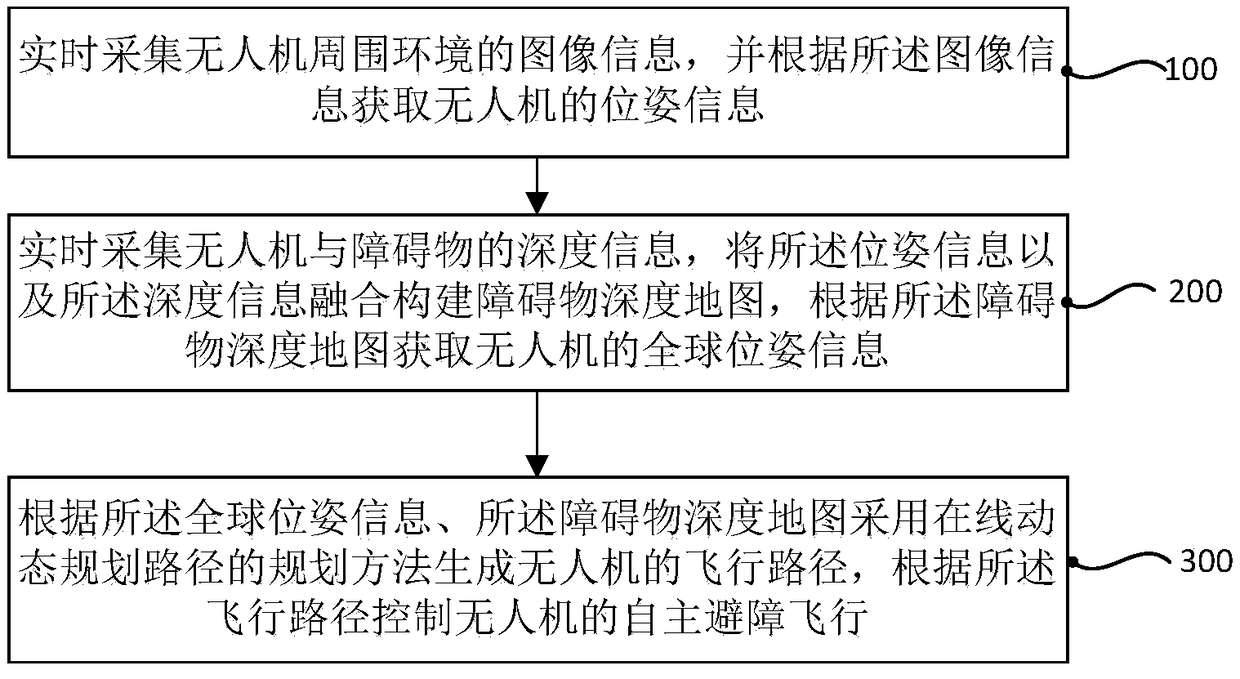
[0066] figure 1 It is a flowchart of a multi-sensor fusion-based SLAM navigation method for an unmanned aerial vehicle according to an embodiment of the present invention.
[0067] In one embodiment of the present invention, the multi-sensor fusion-based unmanned aer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More