

Walking chair device controlled by electroencephalogram signals and control system thereof
A control system and brain-controlled technology, which is applied in the field of intelligent robots, can solve the problems that users are difficult to adapt to, and there is no special design for wheelchair walking needs, so as to achieve the effect of expanding the scope of application and expanding the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] A brain-controlled wheelchair design and control method using limited types of EEG signals proposed by the present invention will be further described in detail below in conjunction with design examples and accompanying drawings, but the following examples are only illustrative, and the scope of protection of the present invention does not Limited by these examples.
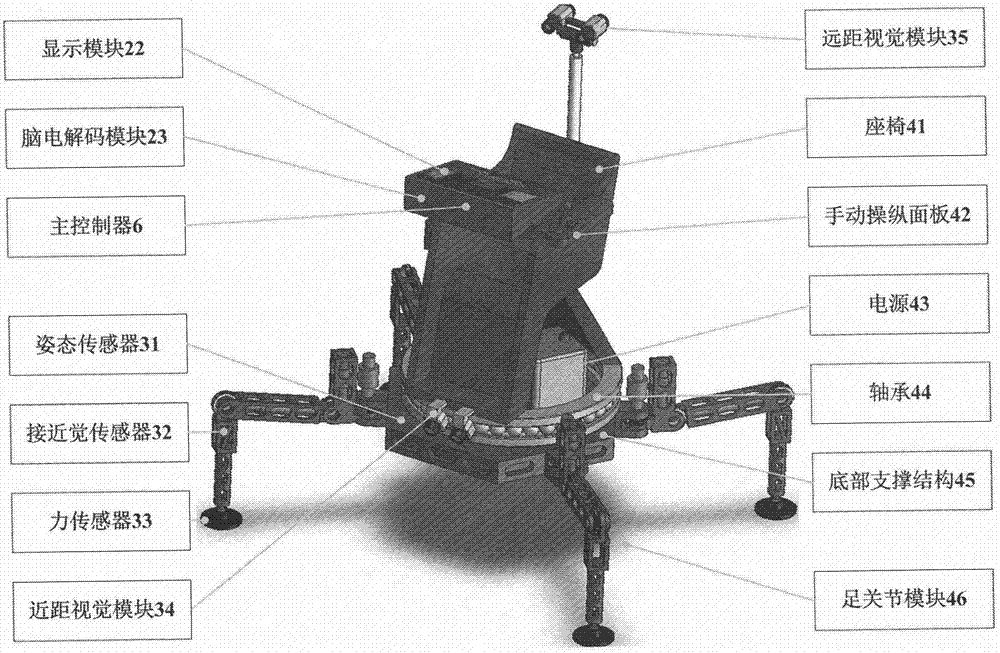
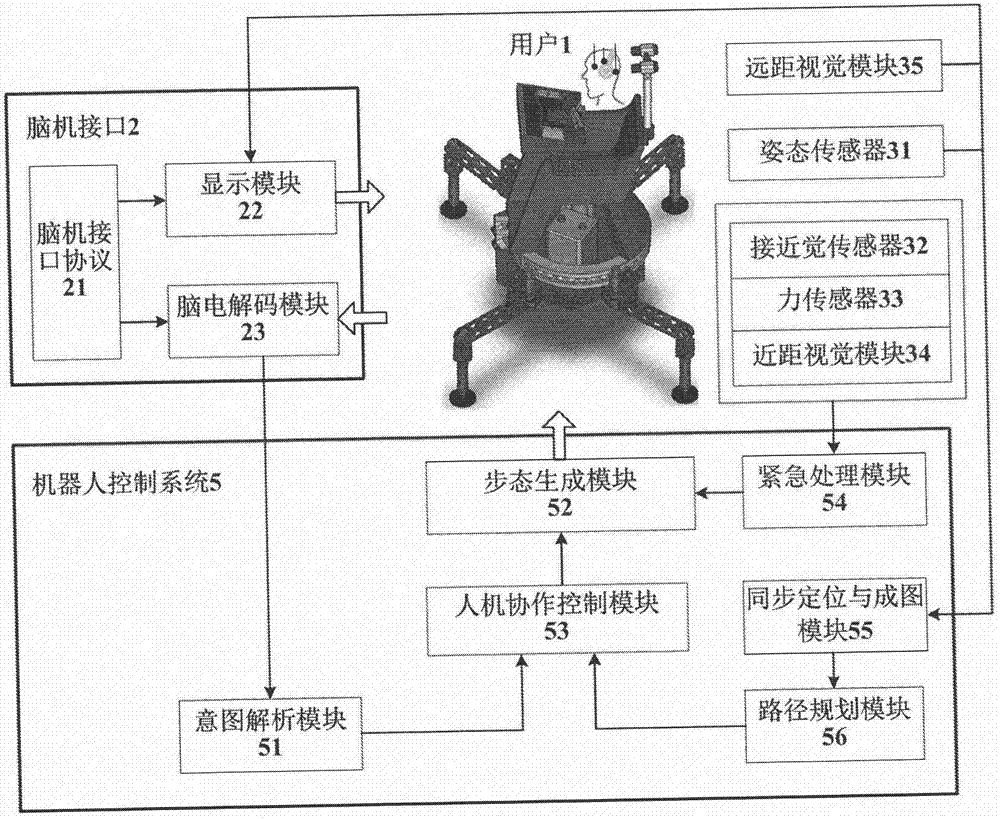
[0017] Such as figure 2 As shown, the brain-controlled walking chair robot system is composed of a walking chair robot 3 and a brain-computer interface 2 . User 1 is responsible for declaring tasks and making decisions according to the BCI protocol 21, and the walking chair robot 3 obtains the tasks from BCI 2 and executes them.
[0018] The brain-computer interface 2 includes a display module 22 , an EEG decoding module 23 and a brain-computer interface protocol 21 . Among them, the EEG decoding module 23 obtains EEG information through electrodes arranged on the surface of the cortex of the user 1's s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More