

Flexible polishing constant-force control device driven by double actuators
A control device and actuator technology, which is applied to grinding automatic control devices, manufacturing tools, grinding/polishing equipment, etc., can solve the problems of slow response, poor force control ability, and insufficient adjustment accuracy, and achieves smooth grinding and improved Grinding quality, effect of high force adjustment accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The dual-actuator-driven flexible grinding constant force control device of the present invention is used for grinding and processing the side wall of a workpiece by an industrial robot to improve the surface quality of the workpiece.
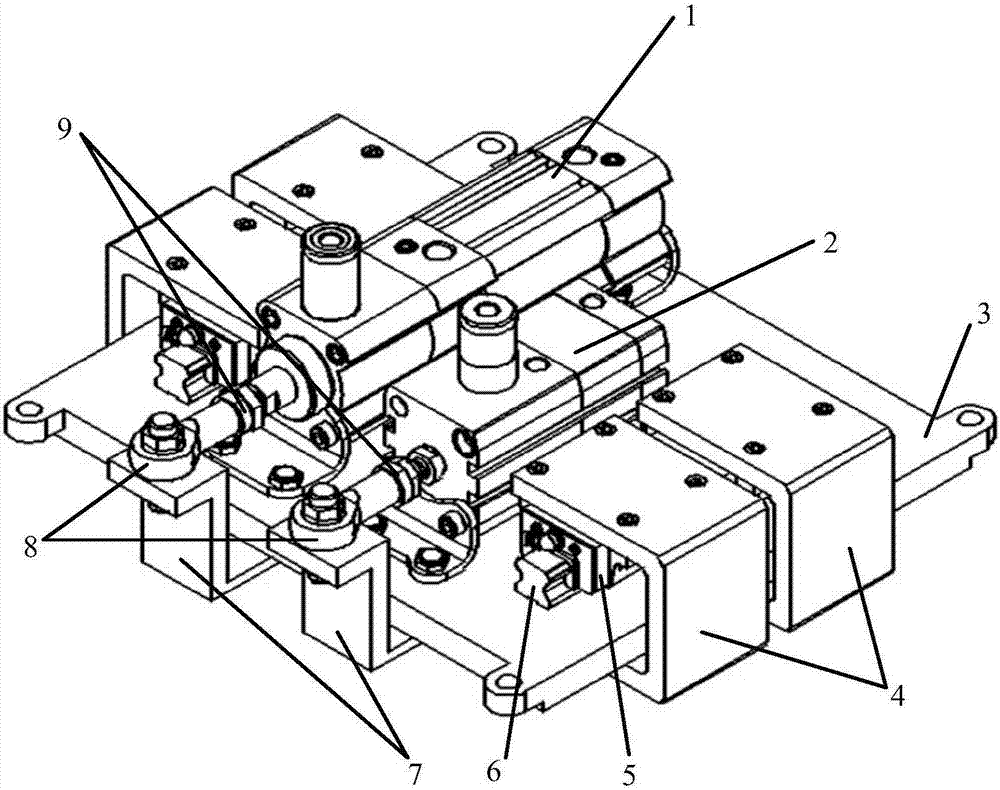
[0018] figure 1 The structure of the flexible grinding constant force control device driven by double actuators of the present invention is given. It includes a bottom plate 3, a linear guide rail 6, a main adjustment cylinder 1, a fine adjustment cylinder 2 and a joint bearing 8. The bottom plate 3 is the base body, and the plate surface is processed with different hole shapes according to requirements, which are used for positioning and installation of components such as cylinders and linear guide rails. The main adjustment cylinder 1 and the fine adjustment cylinder 2 are installed side by side in the middle of the bottom plate 3. Considering the space problem, the cylinder is preferably "single outlet type", the cylinder body is fix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More