

Visual sense simultaneous localization and mapping method based on dot and line integrated features
A technology that integrates features and positioning methods. It is used in instruments, character and pattern recognition, computer components, etc. It can solve the problems of high robustness, time-consuming, and environmental dependence, and achieve good clustering effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to better understand the technical solution of the present invention, further description will be made below in conjunction with the accompanying drawings.
[0040] Using the clustering method to build a visual dictionary offline, determine the inverse text frequency (IDF) of the node:
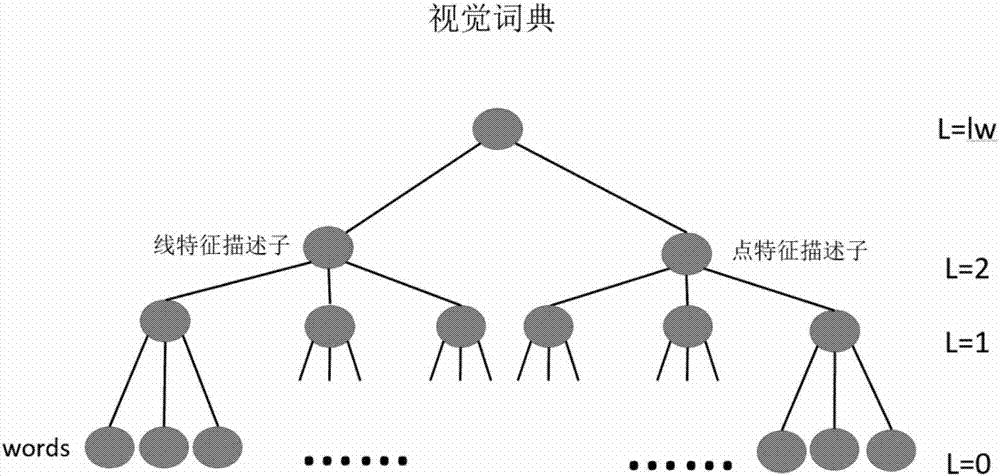
[0041] In order to judge whether the camera has repeatedly visited the same area, the features contained in each frame image itself are converted into visual vocabulary. These visual vocabularies correspond to a discretized description subspace—called a visual lexicon. like figure 1 As shown, a large number of feature descriptors are used to build a tree-like dictionary offline, and the feature descriptors are extracted from a large number of training image sets. The process of building a tree-like dictionary is also a process of clustering with the Kmeans++ algorithm. The descriptors here are ORB point feature descriptors and LBD line feature descriptors. Since they are a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More