

Locust-simulating flying and jumping robot based on metamorphic mechanism and flying control method thereof
A metamorphic mechanism and robot technology, which is applied in the field of bionic robots and robots, can solve the problems of high energy consumption when the robot takes off, deviates from the expected target position, and is difficult to achieve continuous jumping. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings. Embodiments of the present invention include, but are not limited to, the following examples.
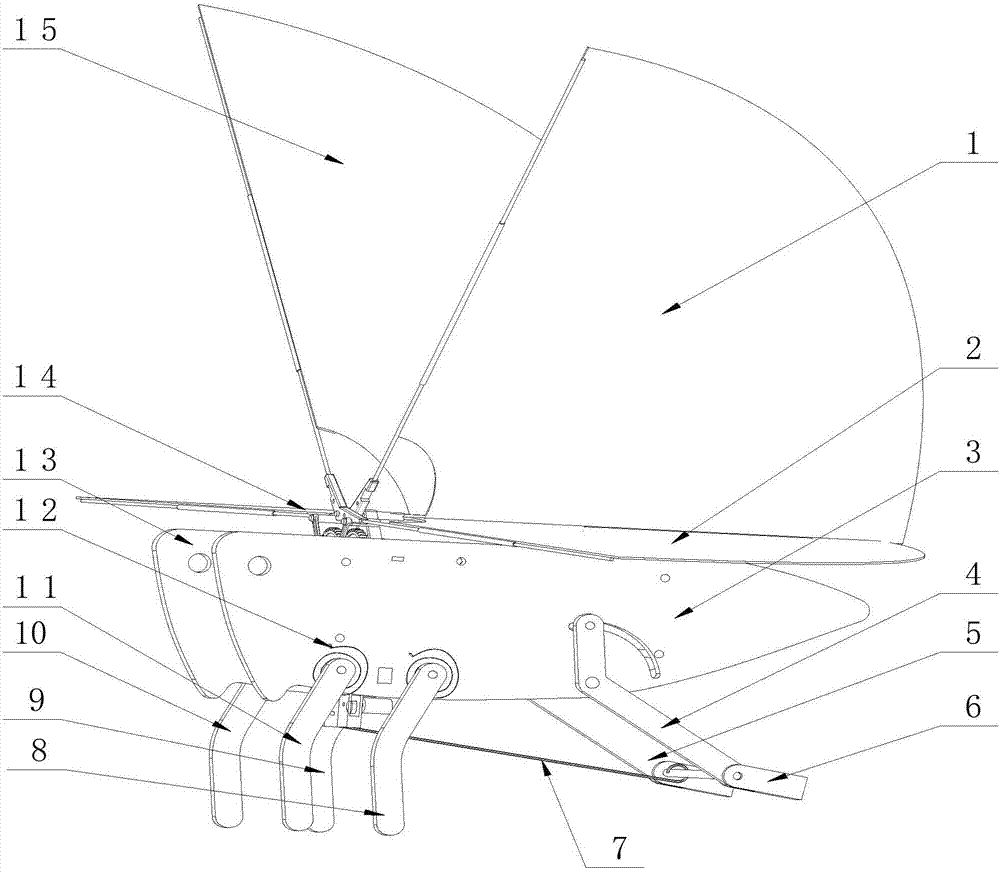
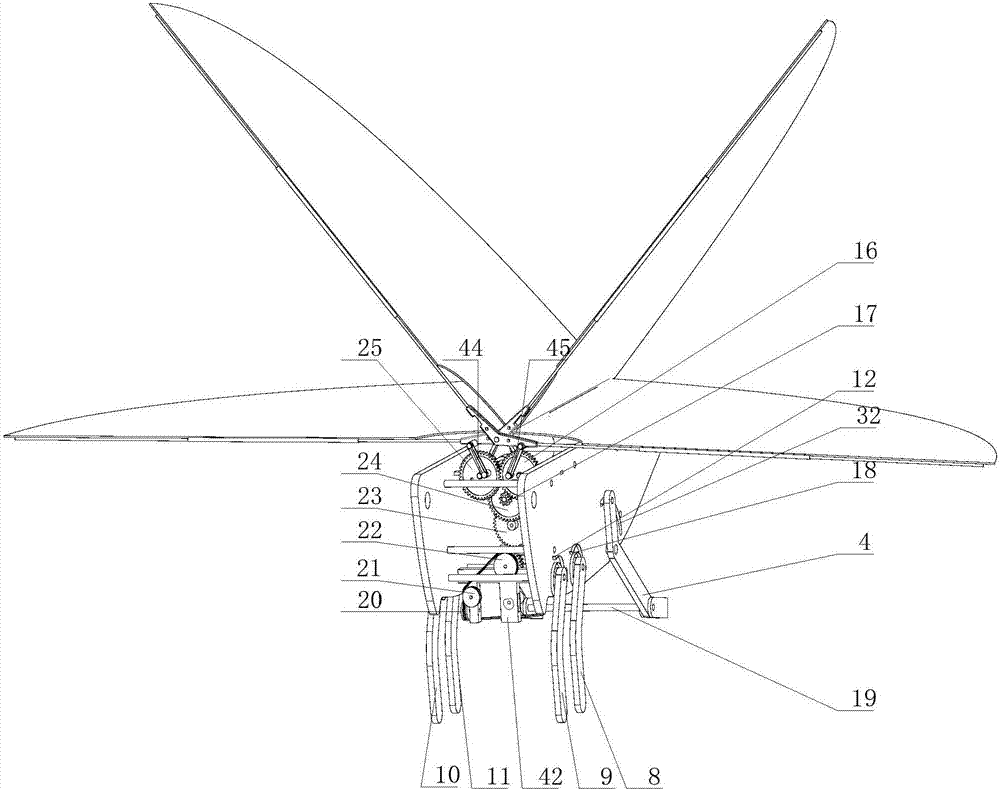
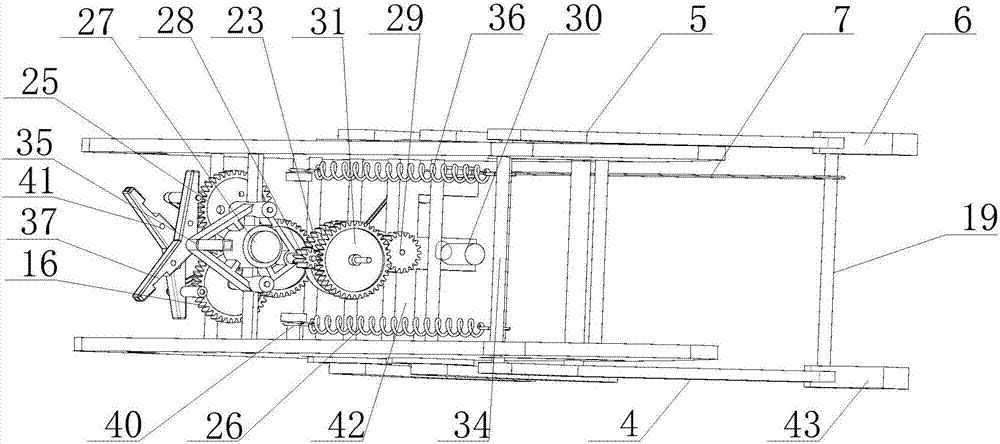
[0047] Such as Figure 1-8 A locust-like flying and jumping robot based on a metamorphic mechanism is shown, the robot is mainly composed of a locust-like structure part and a mechanical transmission system part located in the locust-like structure part;
[0048] Described imitation locust structure part comprises the left fuselage 13 and the right fuselage 3 that are arranged oppositely, is connected by fuselage connecting frame shaft 42 and fixed shaft between the left fuselage 13 and the right fuselage 3, described left fuselage 13 and the right fuselage 3 The upper end of the right fuselage 3 is provided with a rear wing shaft insertion bracket 37 and a front wing shaft insertion bracket 41, and the rear wing shaft insertion bracket 37 is connected with a left wing lower ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More