

Cable-controlling submersible vehicle capable of efficiently withdrawing AUV underwater
An underwater recovery and high-efficiency technology, used in underwater ships, underwater operation equipment, special-purpose ships, etc., can solve the problems of complex mechanical structure, low docking success rate, poor applicability, etc., and achieve good motion controllability and docking. Process safety and high applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
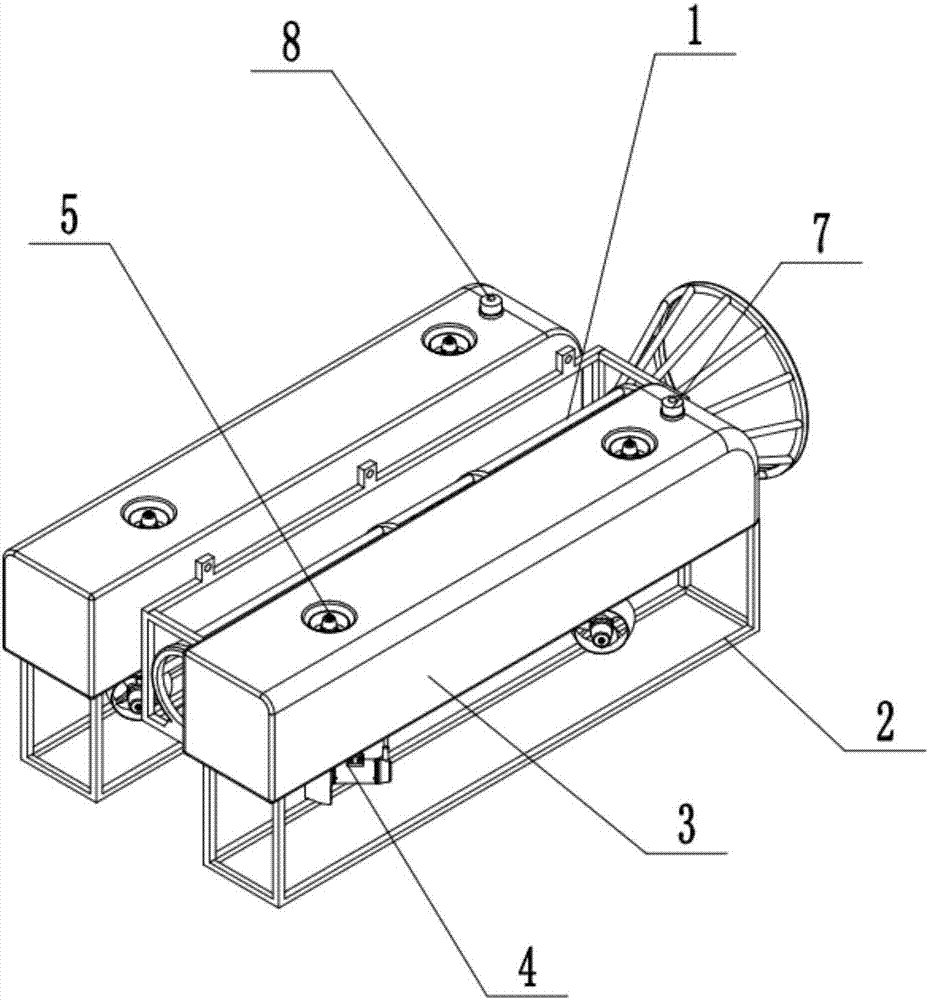
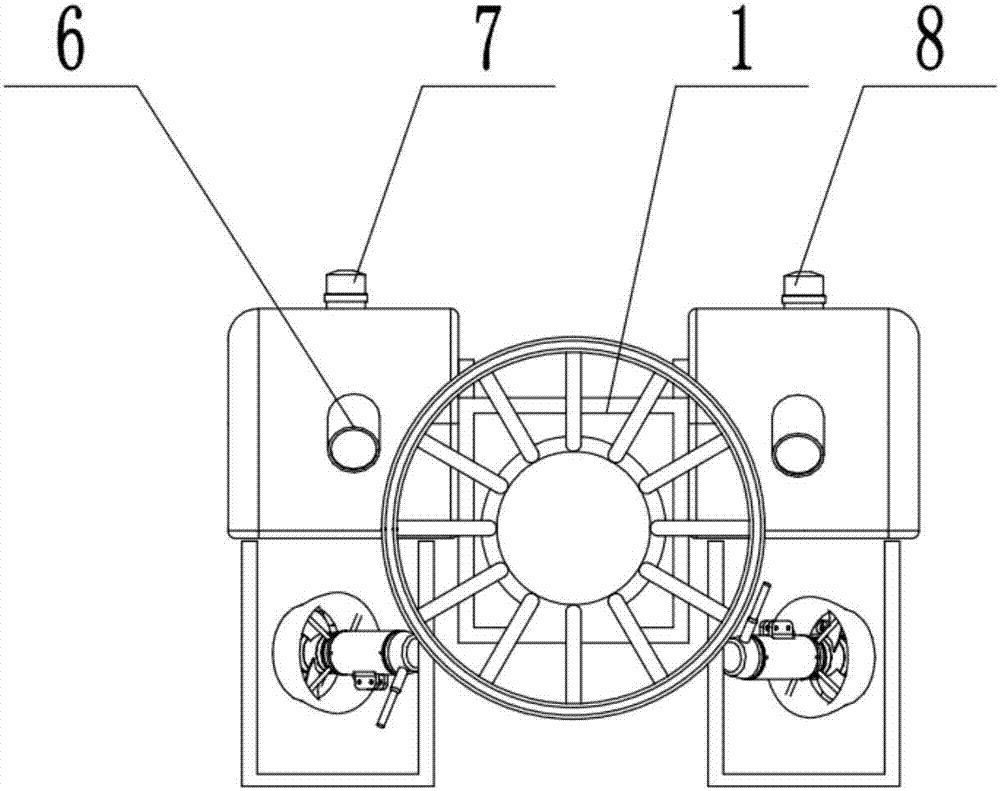
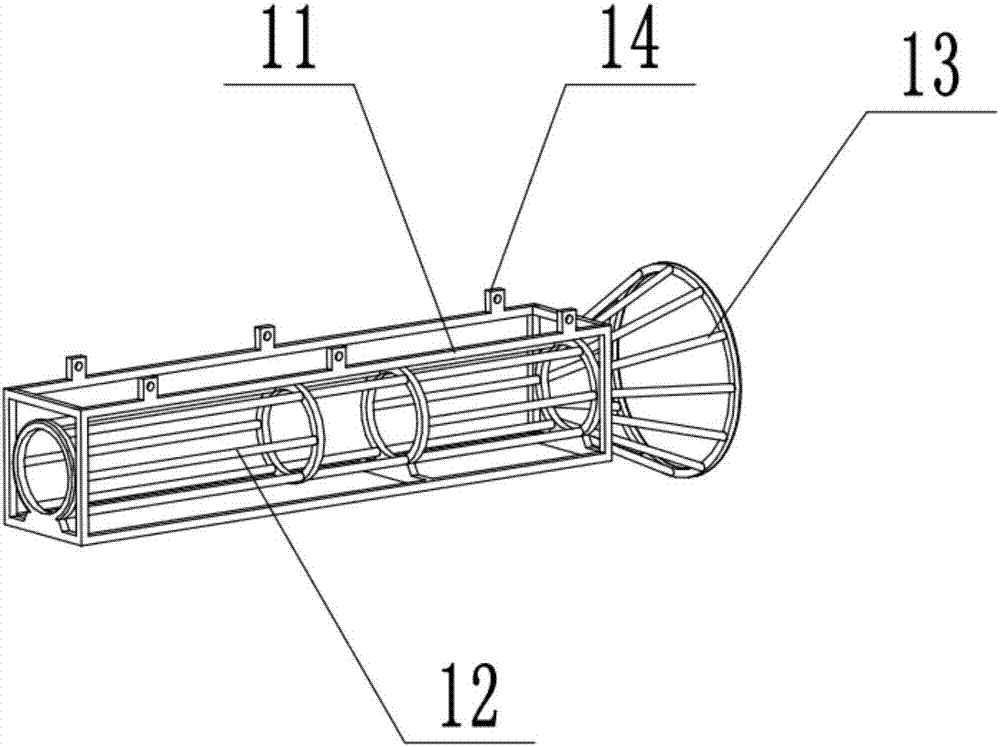
[0020] Such as Figure 1 to Figure 4 As shown, the cable control submersible for efficient underwater recovery of AUV in this embodiment includes a support frame 2 and a buoyancy block 3 symmetrically installed on both sides of the AUV docking mechanism 1, and the buoyancy block 3 is fixed on the top of the support frame 2; The front and rear directions of the top and the bottom of the 3 are separately installed with a horizontal propeller 4 and a vertical propeller 5, such as figure 1 In this embodiment, four horizontal thrusters 4 and four vertical thrusters 5 are included. A lighted camera 6 is installed on the front end of the buoyancy block 3, a sonar 7 is installed on the top of the buoyancy block 3 on one side, and a laser communication unit 8 is installed on the top of the buoyancy block 3 on the other side; the AUV docking mechanis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More