

Exoskeleton assistance equipment
An exoskeleton and equipment technology, applied in the field of exoskeleton assist equipment, can solve problems such as being unable to be widely used in industrial production, unable to achieve results, and staying in the scientific research stage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
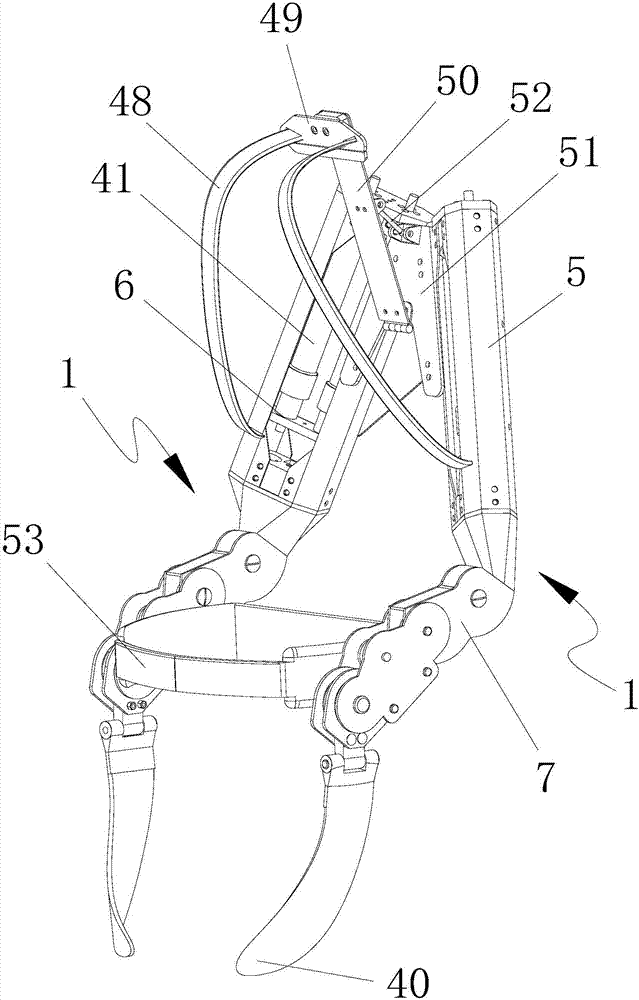
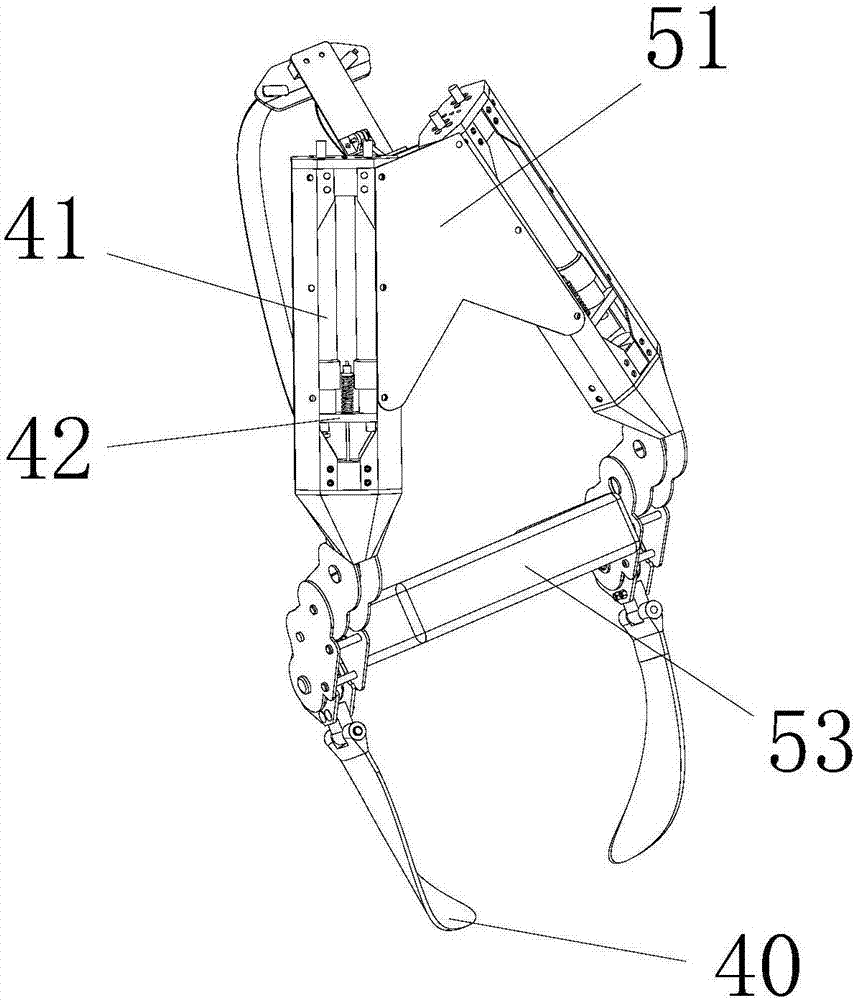
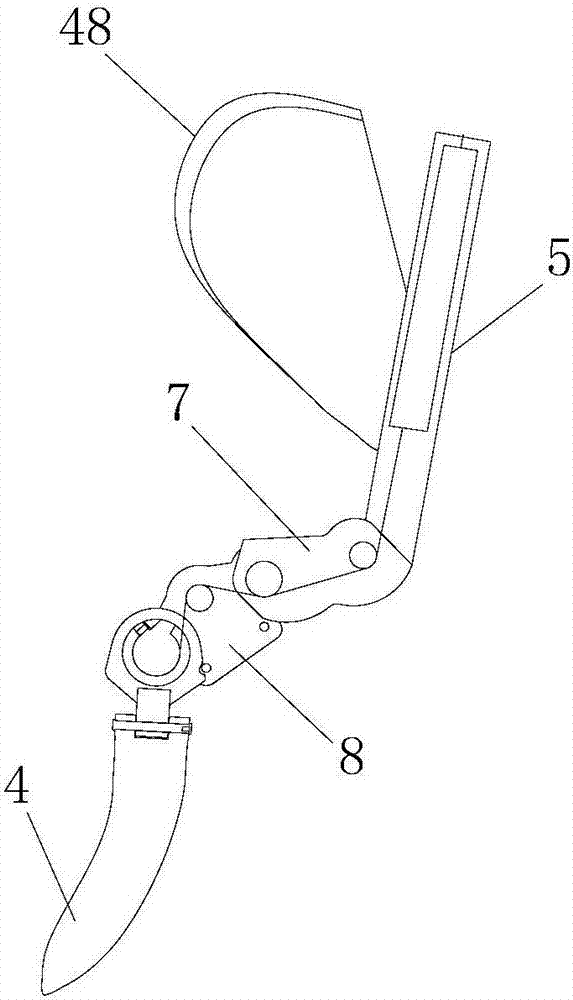
[0101] Such as Figure 1-7 and Figure 16 Shown: an exoskeleton assisting device, including a body wearing part, a control system, and two actuators 1, the two actuators are connected through the body wearing part, both of which include a traction cable 2, a power part 3, The rotary joint and the fulcrum part 4 worn on the leg, the power part 3 includes a frame 5 and a power cylinder 6, the rotary joint includes an upper joint part 7 and a lower joint part 8, and the upper part of the upper joint part 7 is fixedly connected with the frame 5 , the lower part of the upper joint part 7 is hinged with the upper part of the lower joint part 8, the upper joint part 7 is provided with a guide wheel 9 and a secondary winding wheel 10, and the secondary winding wheel is arranged at the hinge of the upper joint part 7 and the lower joint part 8 The upper and lower joints 8 are provided with a tensioning wheel 11 and a main winding wheel 12, the fulcrum part 4 is fixed on the main windi...
Embodiment 2
[0133] An exoskeleton assisting device, including a body wearing part, a control system and two actuators, the two executing devices are connected through the body wearing part, the executing device includes a traction cable, a power part, a rotating joint and a fulcrum part, and the power part Including the frame and the power cylinder, the rotary joint includes an upper joint and a lower joint. The winding wheel and the auxiliary winding wheel are arranged on the hinge of the upper joint part and the lower joint part. The tension wheel and the main winding wheel are arranged in the lower joint part. The fulcrum part is fixed on the main winding wheel. The ends of the traction cable are respectively fixed to the power cylinder and the main winding wheel, and the middle part of the traction cable is wound with the guide wheel, the secondary winding wheel and the tensioning wheel in sequence from top to bottom;
[0134] The control system includes a controller, an electric prop...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More