

Double-arm-cooperative robot
A robot and double-arm technology, applied in the field of robotics, can solve the problem of inflexible cooperation between arms, and achieve the effect of precise action
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
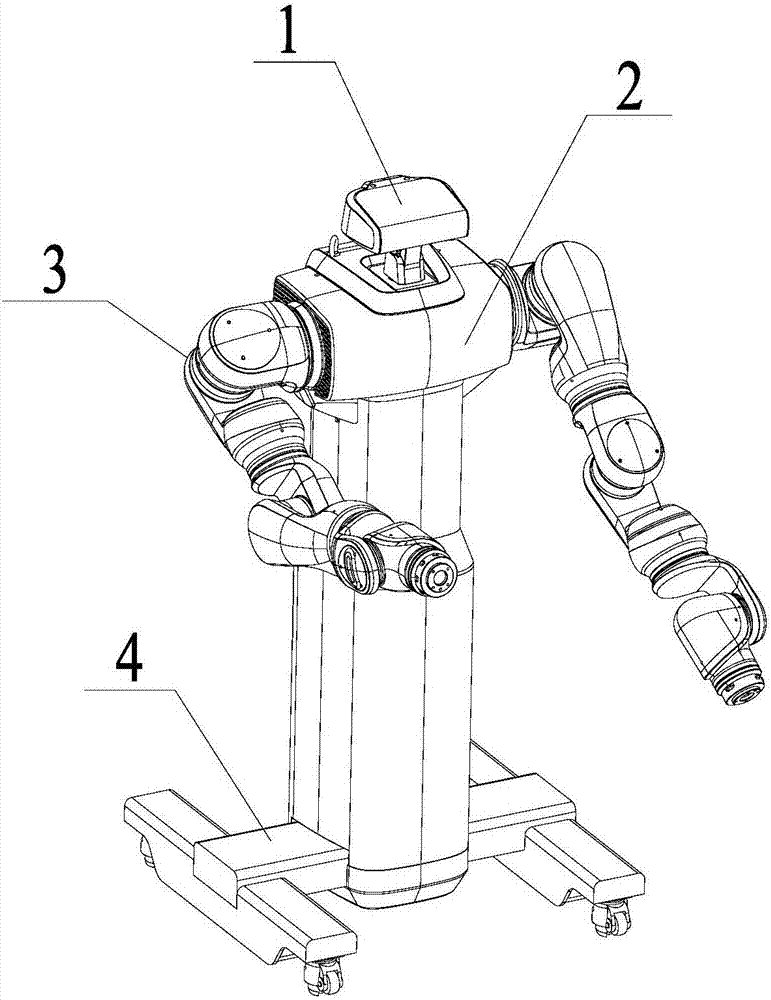
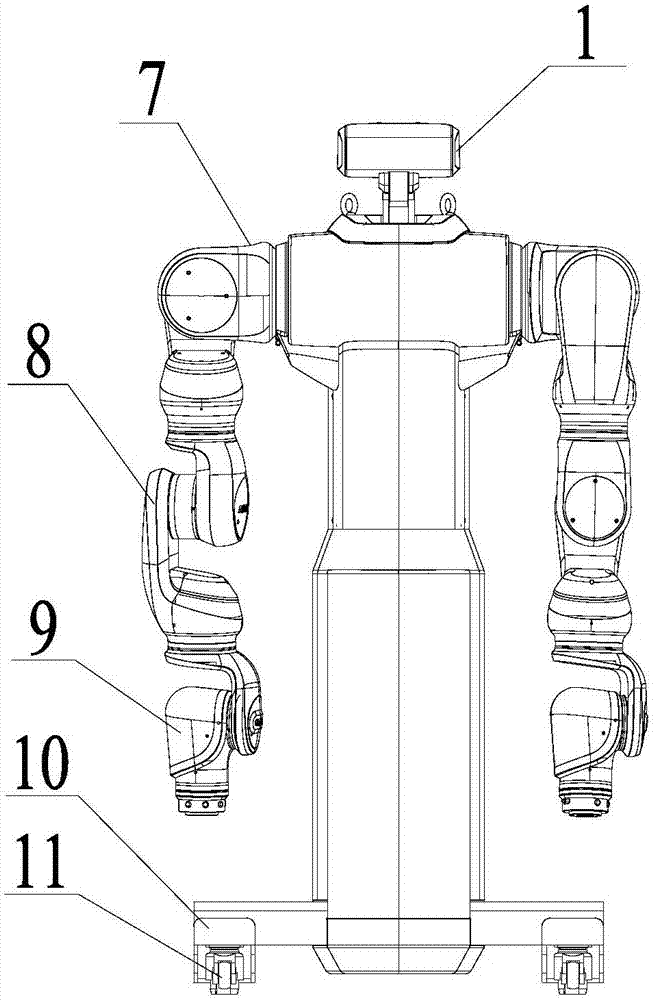
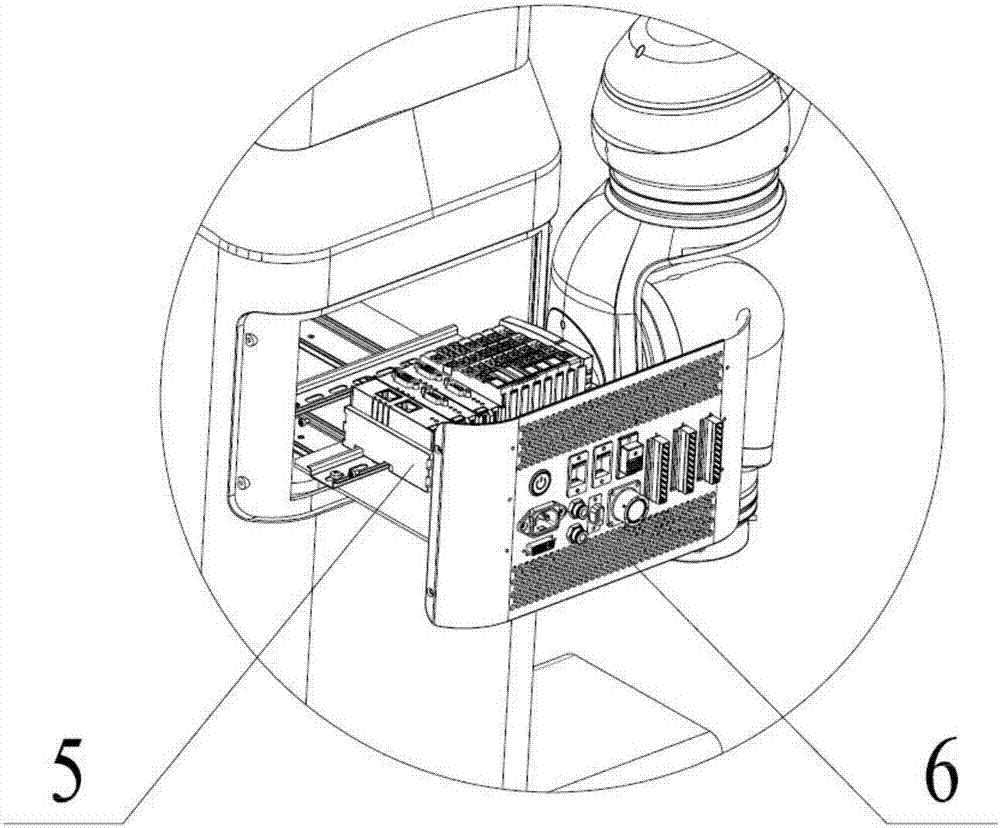
[0037] Such as Figure 1-3 As shown, a dual-arm collaborative robot includes a binocular vision component 1, an integrated integrated control cabinet 2, a dual-arm component 3 and a movable platform 4, and the integrated integrated control cabinet 2 is provided with a power module, a control module, a communication module, braking module, main board and hard disk;
[0038] The binocular vision component 1 includes at least two cameras for collecting image information, the cameras are connected to the head vision board, the head vision board is connected to the main board, and the head vision board is used to obtain image information and calculate the three-dimensional geometry information.
[0039] The dual-arm robot is designed according to the anthropomorphic standing working state, and the area...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More