

Universal, all-terrain and automatic guiding type carrying robot
A handling robot and automatic guidance technology, which is applied in the field of handling robots, can solve problems such as severe bumps, and achieve the effect of avoiding car outage and reducing collision accidents.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings.
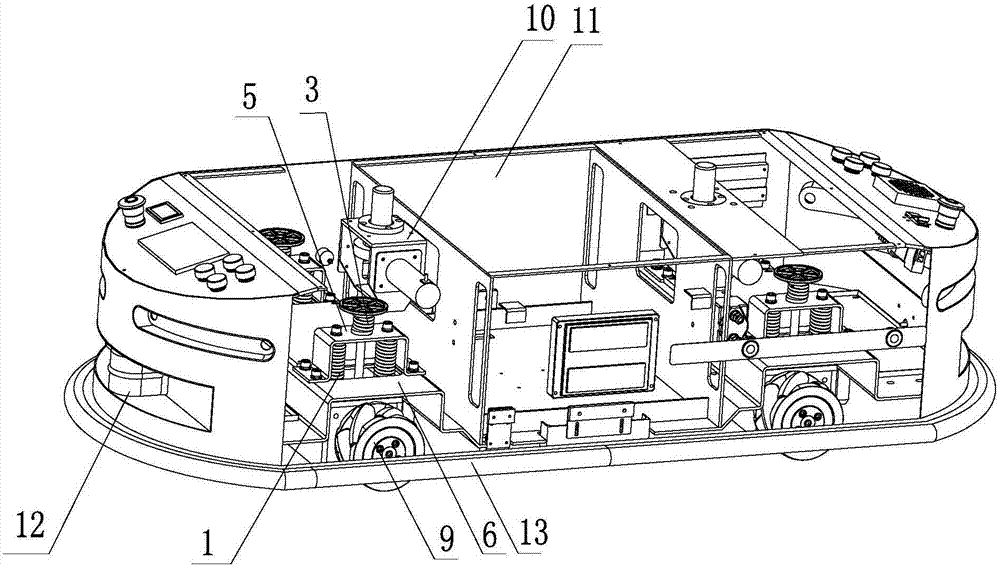
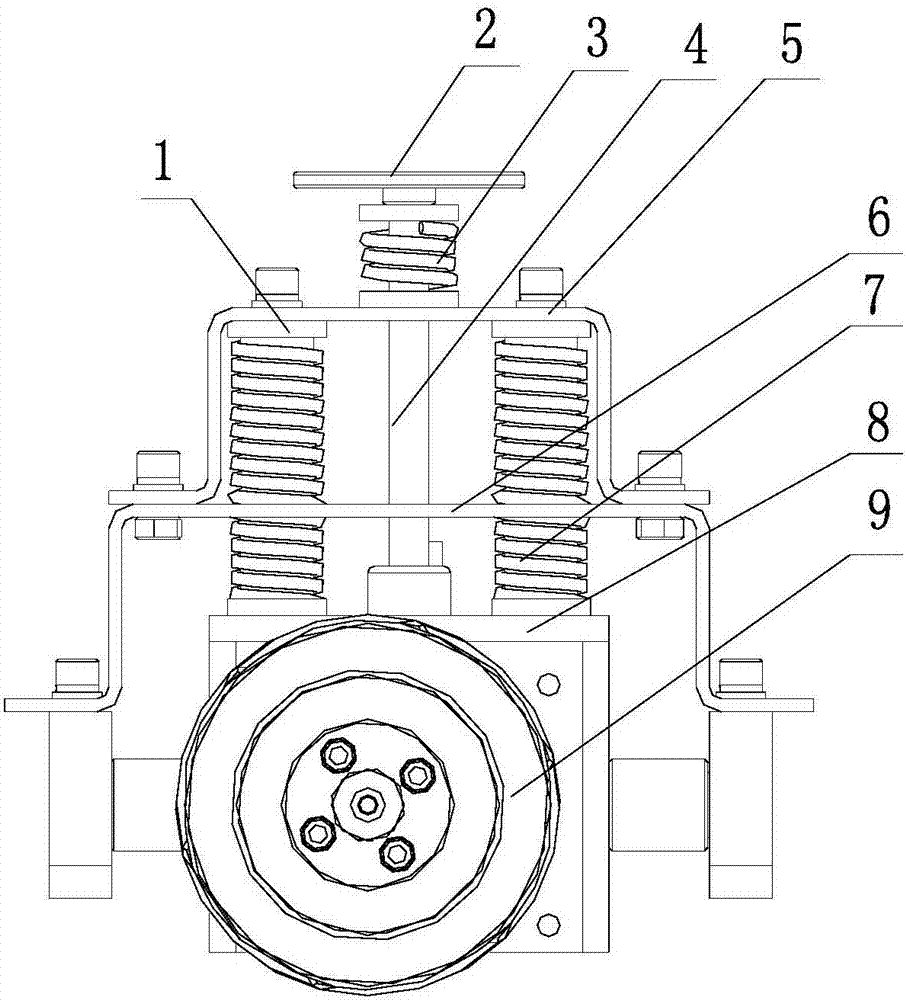
[0016] Such as figure 1 and figure 2 As shown, the all-round and all-terrain automatic guiding handling robot of the present invention includes a vehicle frame, a trolley bottom plate, four mecanum wheels and motor equipment for driving the mecanum wheels, the vehicle frame is matched with the bottom plate, and the motor equipment is installed on Below the bottom plate of the trolley, each mecanum is equipped with an independent motor device, and a shock absorbing mechanism is arranged at the corresponding position of each motor device. The bottom plate of the trolley is provided with four via holes. Column 4, primary shock-absorbing spring 7 and secondary shock-absorbing spring 3, described spring pressure plate 5 is fixed on the bottom plate 6 of the trolley, primary shock-absorbing spring 7 passes through the via hole on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More