

Underwater crawling and swimming type robot and working method thereof
A robot and fuselage technology, applied in underwater operation equipment, motor vehicles, ships, etc., can solve problems such as poor seabed detection and operation tasks, and achieve the effects of reducing energy consumption, load, and resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with accompanying drawing.
[0032] An underwater crawling-swimming robot includes a robot body, a robot leg group, a propulsion device group, a battery and a controller.
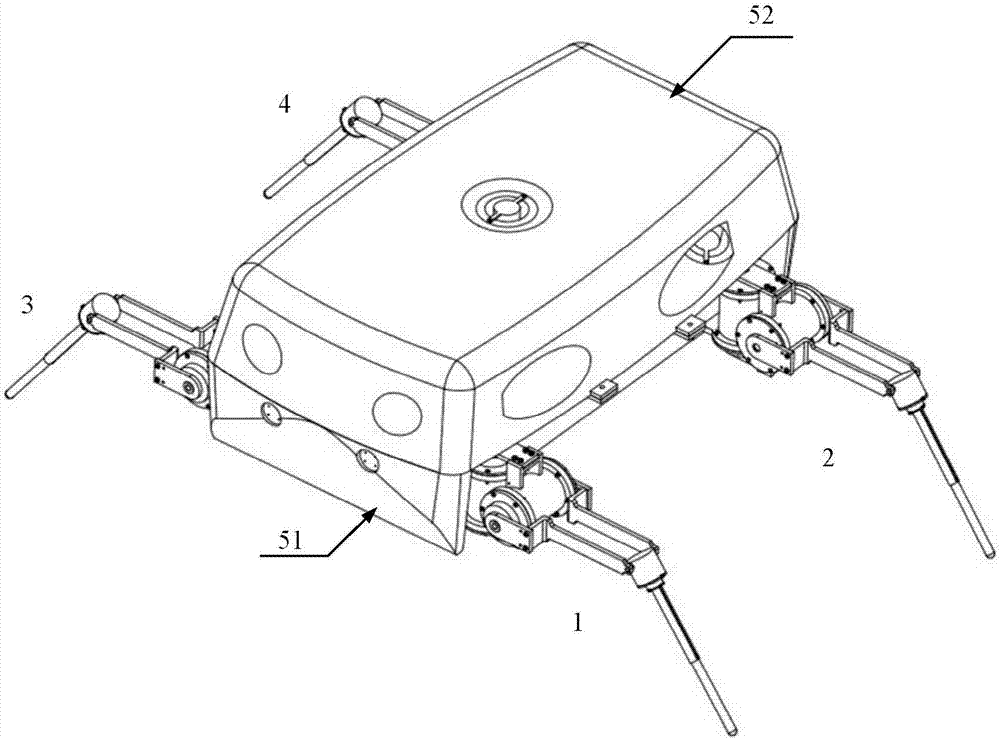
[0033] Such as figure 1 As shown, the robot fuselage comprises a fuselage chassis 51 and a fuselage upper cover 52. The fuselage upper cover 52 is placed on the fuselage chassis 51 and fixed by bolts.
[0034] The set of robot legs includes a first robot leg 1 , a second robot leg 2 , a third robot leg 3 and a fourth robot leg 4 . The robot leg groups are distributed on both sides of the robot body, the first robot leg 1 and the second robot leg 2 are located on one side of the robot body, the third robot leg 3 and the fourth robot leg 4 are located on the other side of the robot body, and the first robot leg 2 is located on the other side of the robot body. The robot leg 1 and the third robot leg 3 are distributed symmetrically ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More