

Three-dimensional route planning method based on improved fruit-fly optimization algorithm
A fruit fly optimization algorithm and route planning technology, applied in the field of robotics, can solve problems such as limited applicability of coding methods and multiple local optima
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
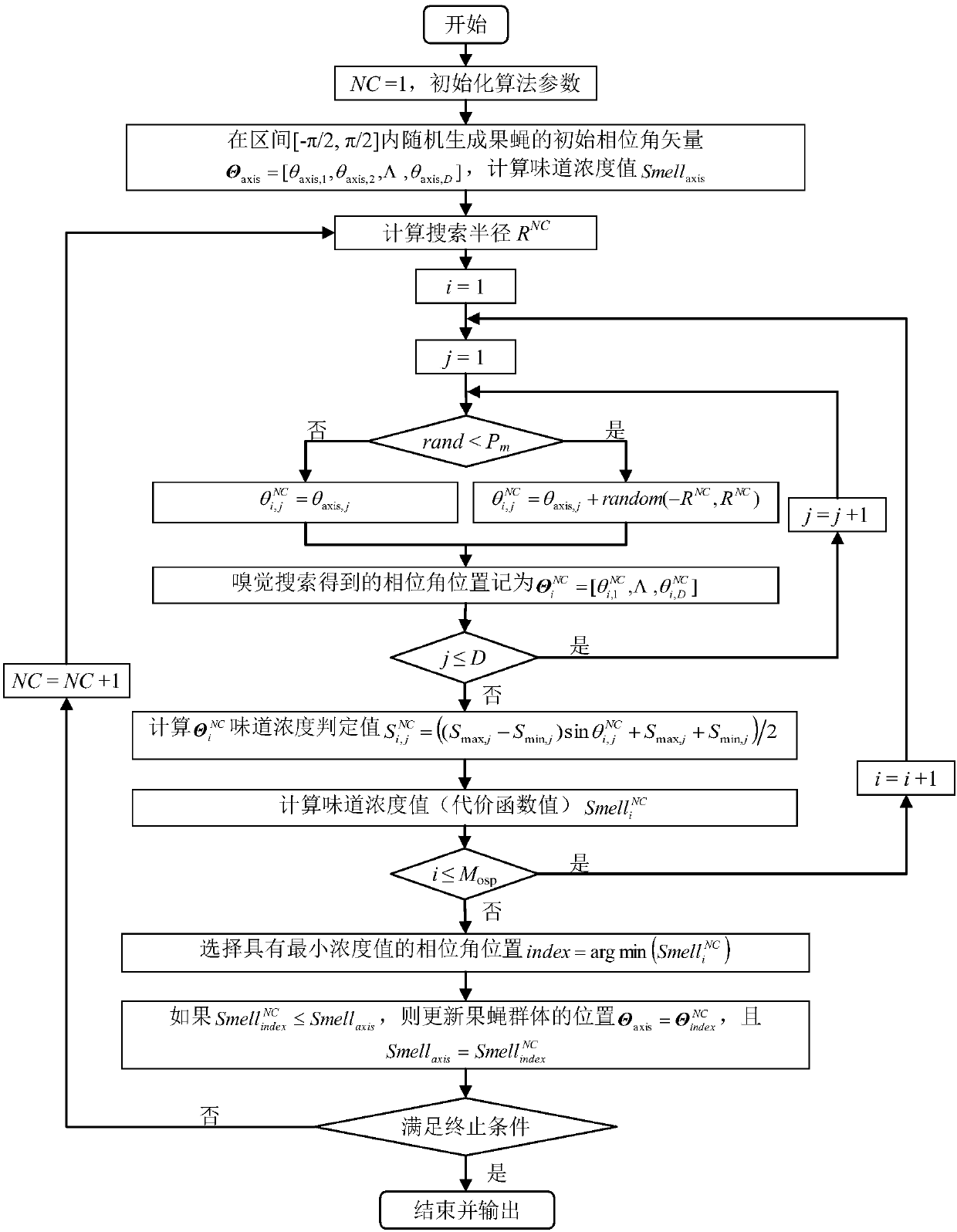
[0099] The embodiment of the present invention provides a three-dimensional route planning method based on the improved fruit fly optimization algorithm, which is used to solve the three-dimensional route planning method of the unmanned aerial vehicle under the complex terrain environment and the threat situation of the battlefield by making improvements to the original fruit fly optimization algorithm, The steps are as follows.
[0100] Preparatory work:
[0101] Determine the UAV flight mission information, including the starting point coordinates (x S ,y S ,z S ) T and the end point coordinates (x T ,y T ,z T ) T , the mission map boundary, the number n of route control points that need to be planned;
[0102] Determine enemy ground weapon information, including threat type (radar, missile, anti-aircraft gun), weapon location (x threat j ,y threat j ) T , and their respective threat areas.
[0103] Set the relevant parameters of the improved fruit fly algorithm,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More