

Pointer instrument reading recognition method of substation inspection robot
A technology for inspection robots and instrument readings, which is applied in the field of image processing, can solve problems such as pointer recognition errors, and achieve the effect of avoiding instrument positioning errors and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0040] The technical scheme that the present invention solves the problems of the technologies described above is:
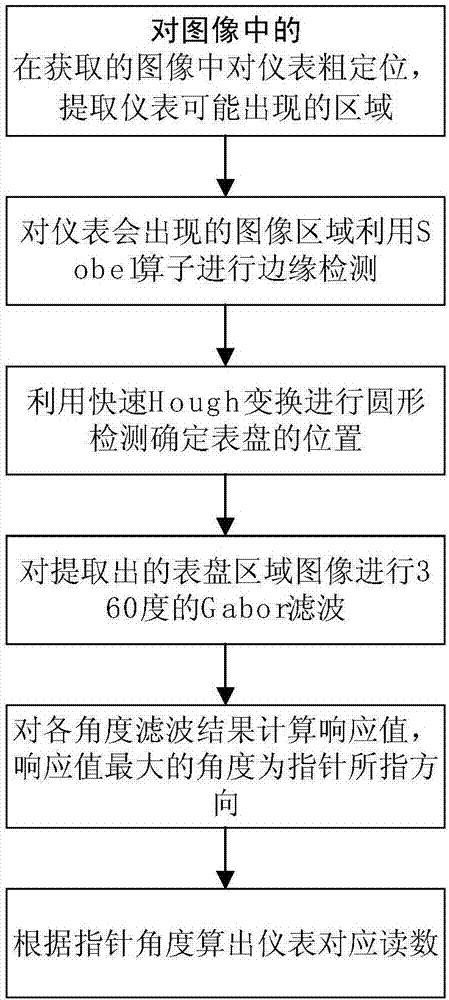
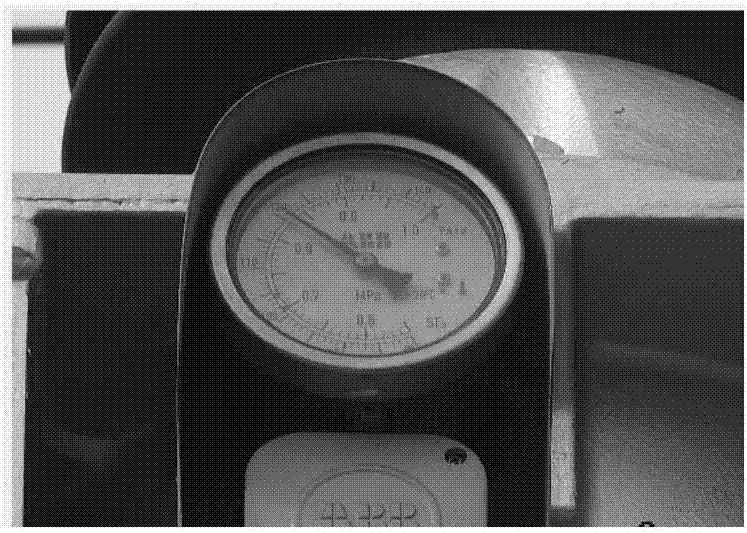
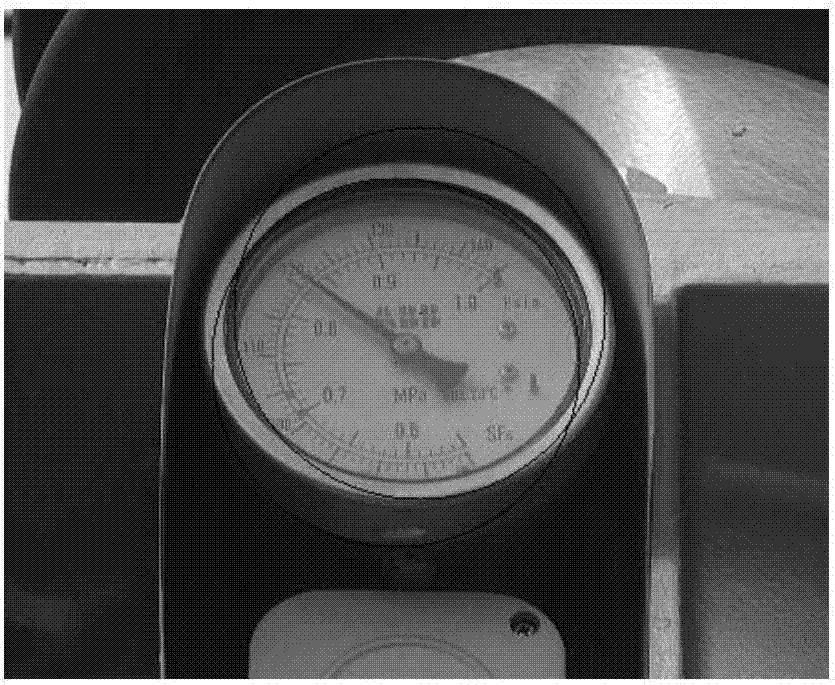
[0041] A pointer instrument reading recognition method for a substation inspection robot, the process is as follows figure 1 , including the following steps: (1) According to the error range of the preset parking position identified by the robot at each meter, extract the image of the region where the meter will appear (2) perform edge detection on the region, and (3) use the fast Hough transform again Carry out circular detection to determine the position of the dial, (4) perform multi-angle Gabor filtering on the extracted dial area image (5) calculate the response value for each angle fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More