

Large-scale intelligent mowing robot p-d type path planning algorithm
A lawn mowing robot and path planning technology, applied in the field of intelligent robots, can solve the problems such as easy missed cuts in the steering area, and achieve the effect of easy automatic generation of complex paths, low complexity, and overcoming easy missed cuts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
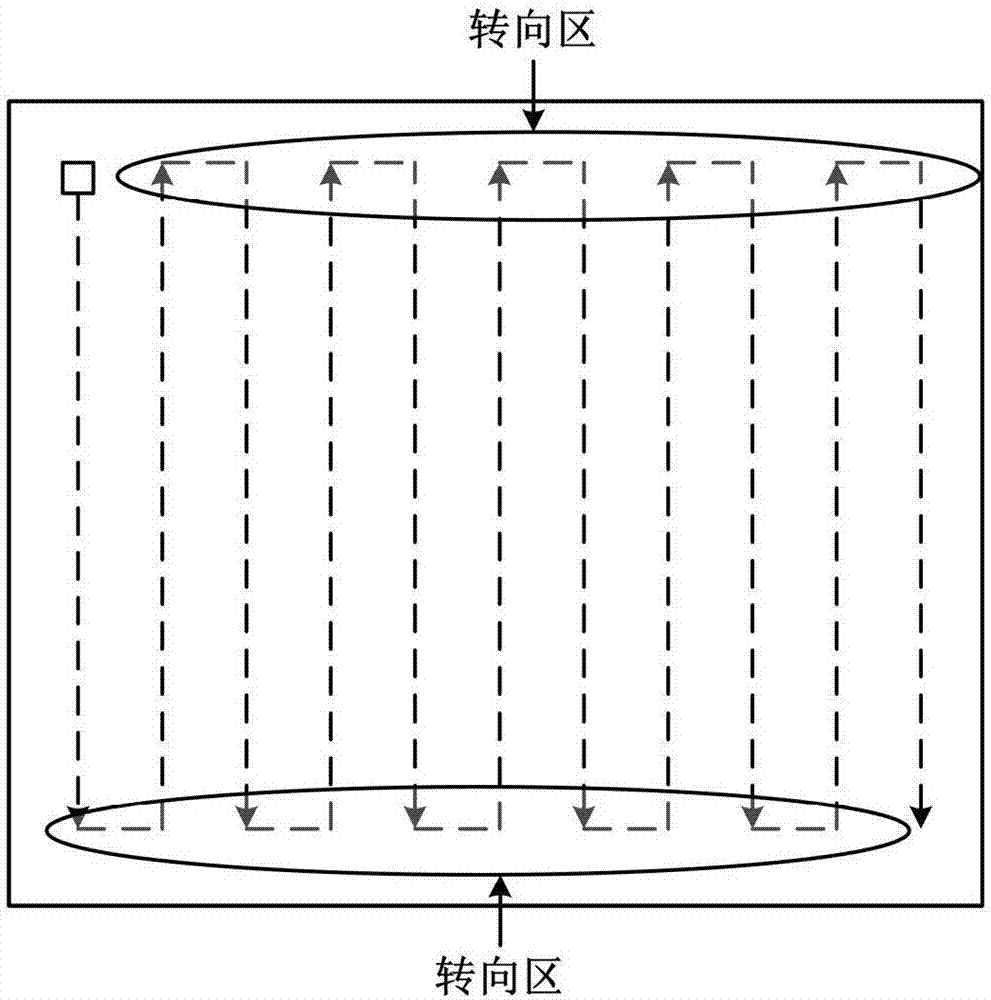
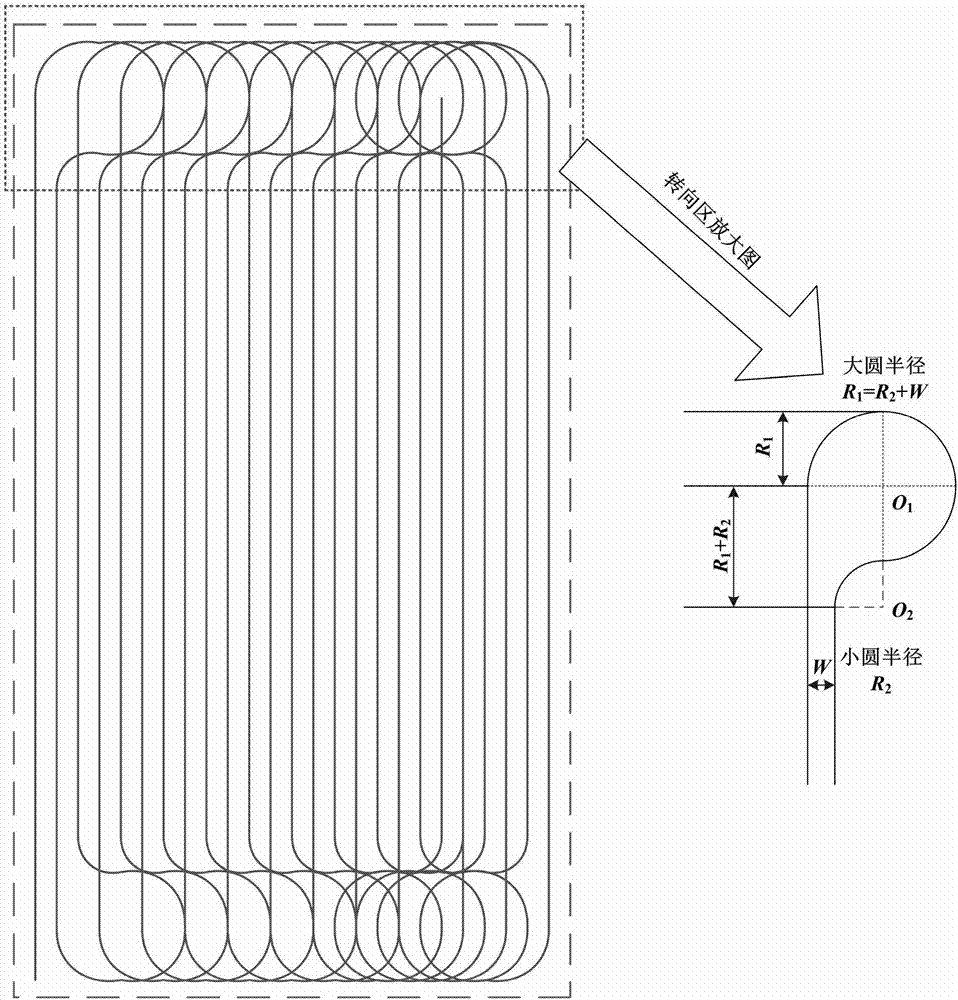
[0046] see figure 2 The p-d path planning algorithm for a large-scale intelligent mowing robot shown in the figure uses a two-circle tangent method instead of the traditional straight-line steering method in the steering area, and keeps the forward direction during the working process of the mowing robot, effectively reducing The difficulty of control not only maintains the advantages of the roundabout path planning algorithm, but also overcomes the disadvantages of the roundabout path algorithm that are easy to miss cuts in the turning area. The specific steps are as follows:
[0047] First, according to the geometric size of the area to be mowed, the performance index of the mowing robot, and the mowing coverage requirements, set the radius R...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More