

Constant-Jacobian parallel mechanism comprising five-freedom-degree branches
A degree of freedom and branching technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficulty and inconvenience in analysis and design, and achieve the effect of convenient analysis and design, and simplified control and trajectory planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
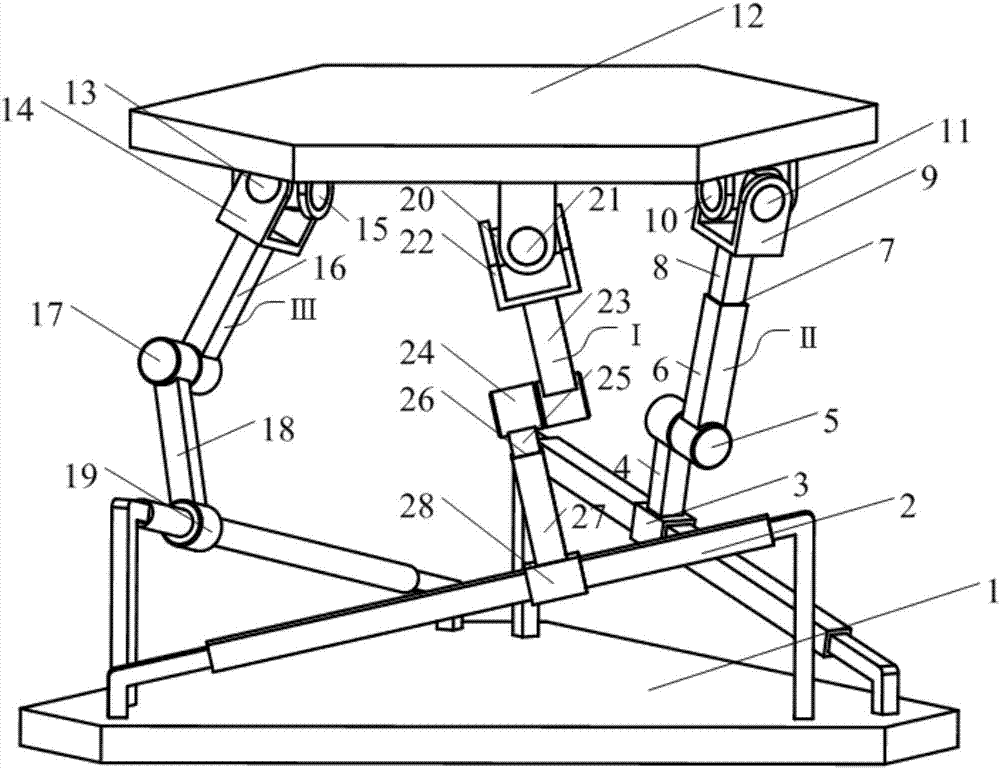
[0009] exist figure 1 In the schematic diagram of the constant Jacobian parallel mechanism with five-degree-of-freedom branches shown, one end of the upper link 23 in the first branch I is connected to the moving platform 12 through the first universal joint 22, and the other end is connected to the moving platform 12 through the first rotating pair 24 It is connected with one end of the middle connecting rod 25, and the other end of the middle connecting rod is connected with one end of the lower connecting rod 27 through the second moving pair 26, and the other end of the lower connecting rod is fixed on the fixed platform 1 through the first moving pair 28. The first guide rail 2 on the top is connected, and the first moving pair is the driving pair; one end of the upper link 8 in the second branch II is connected to the moving platform through the second universal joint 9, and the other end is connected to the moving platform through the fourth moving pair 7. One end of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More