Camera calibrating method and system in vehicle panoramic looking-around system
A panoramic surround view and calibration method technology, applied in the field of assisted driving equipment calibration, can solve problems such as installation error angle error, affecting 360-degree surround view splicing effect, camera parameter error, etc., to ensure accuracy, facilitate mass production line deployment, The effect of high degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
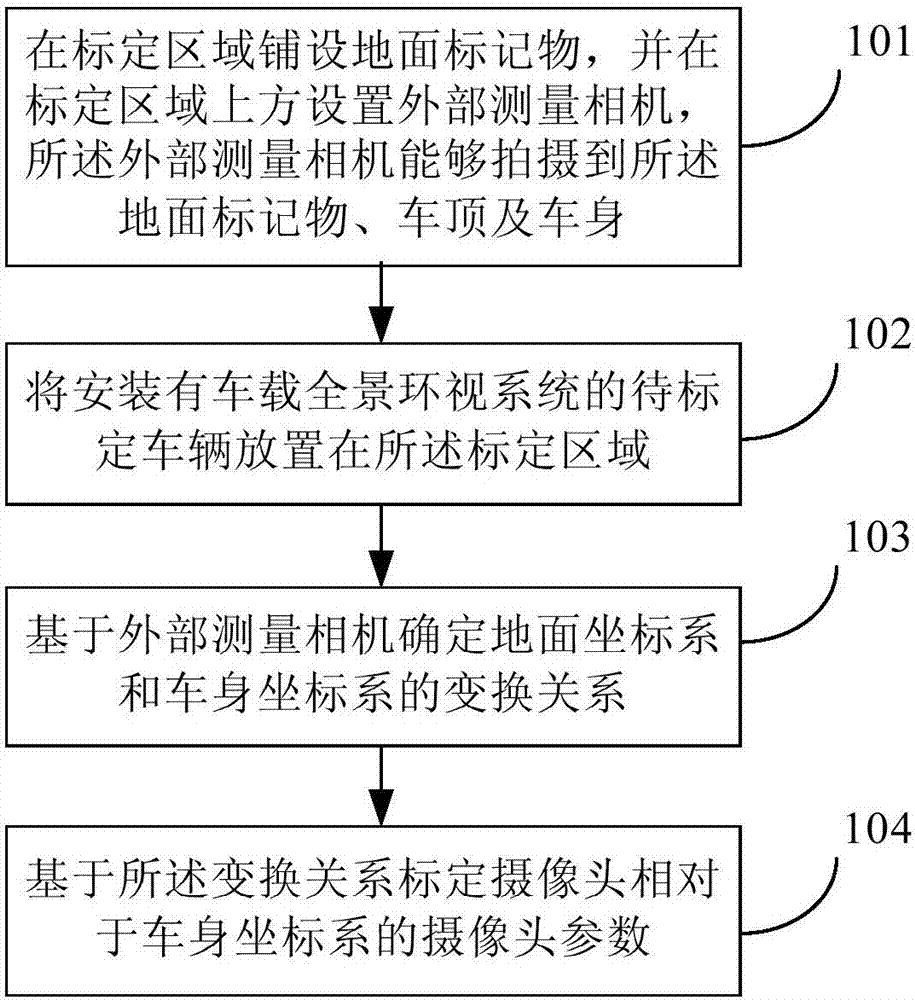
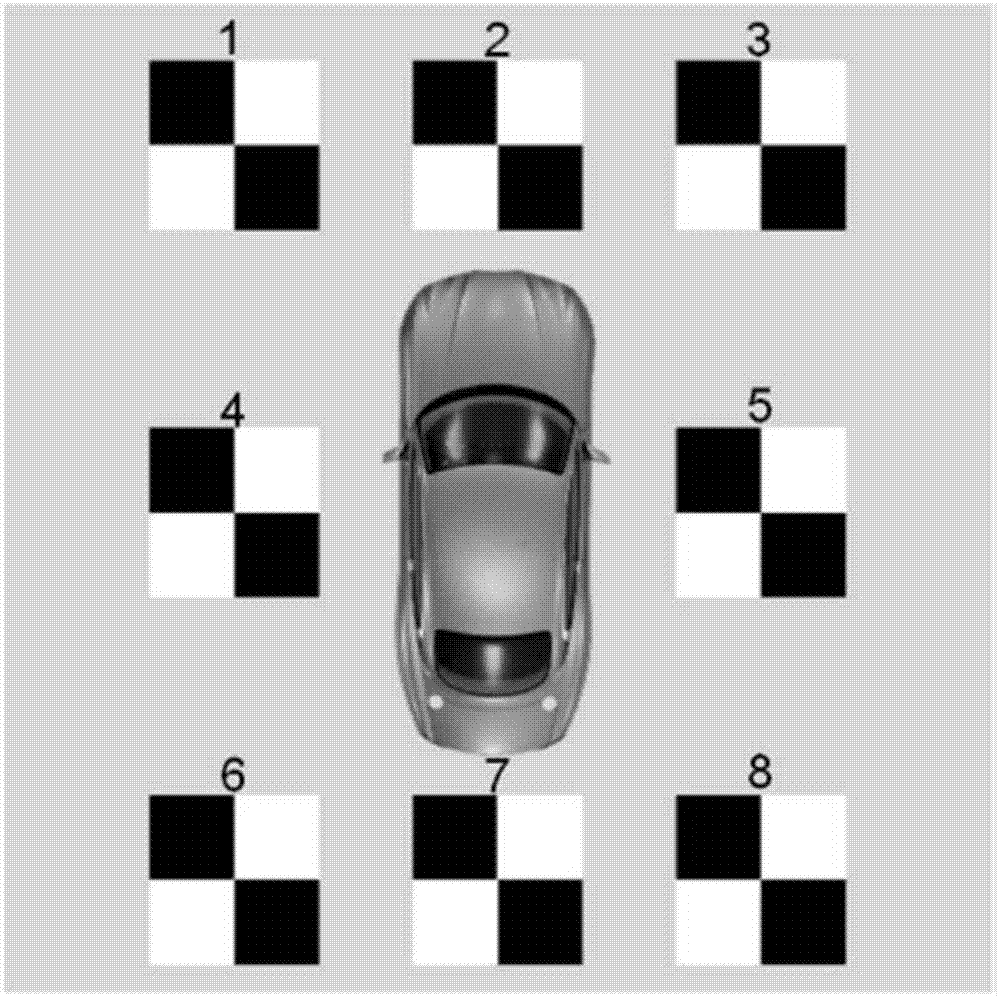
[0175] Example 1: The calibration reference object is set on the roof of the vehicle to be calibrated. Correspondingly, the second calibration unit may include the following subunits:
[0176] A calibration reference object image acquisition subunit, configured to acquire an image of the calibration reference object captured by an external measurement camera;
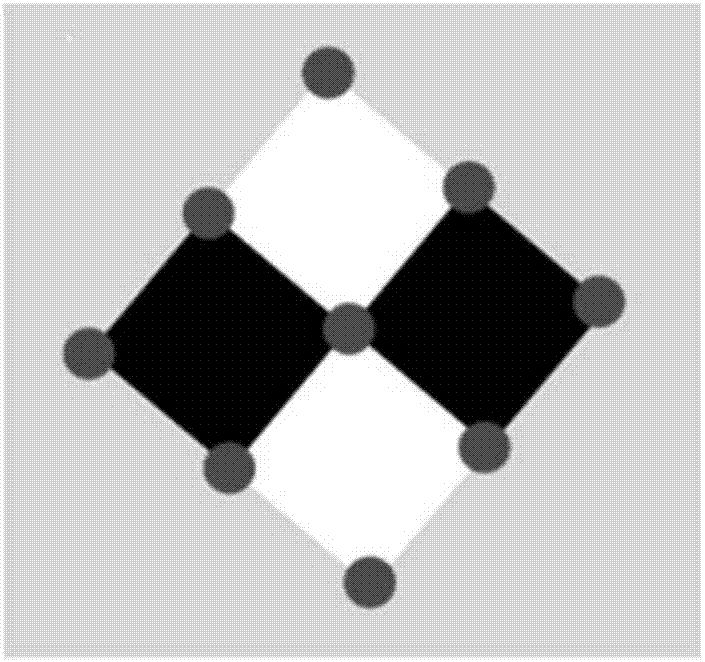
[0177] The first coordinate determination subunit is used to determine the pixel point coordinates of each corner point on the calibration reference object and the physical coordinates of the roof, and determine the position of each corner point on the vehicle body according to the roof physical coordinates of each corner point on the calibration reference object. coordinates in the coordinate system;
[0178] The first parameter calibration subunit is used to calibrate the camera parameters of the external measurement camera relative to the vehicle body coordinate system by using the pixel coordinates of each corner po...
example 2
[0179] Example 2: The calibration reference object is set to be the projection of the body of the vehicle to be calibrated on the ground coordinate system. Correspondingly, the second calibration unit may include the following subunits:
[0180] The body photo acquisition subunit is used to obtain the whole body photo taken by the external measurement camera;
[0181] The calculation subunit is used to calculate the pixel point coordinates of the four projected points in the ground coordinate system around the body in the external measurement camera;
[0182] The second coordinate determination subunit determines the coordinates of four projected points on the ground coordinate system around the vehicle body in the vehicle body coordinate system;
[0183] The second parameter calibration subunit is used to calibrate the coordinates of the external measurement camera relative to the vehicle body according to the pixel coordinates of the four projected points around the vehicle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More