

Low-energy consumption climbing and picking robot for forestry
A technology for picking robots and energy consumption, applied in the field of machinery, can solve the problems such as the inconvenience of automatic climbing of tree trunks, and achieve the effects of simple and clear structure, strong applicability, and energy saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
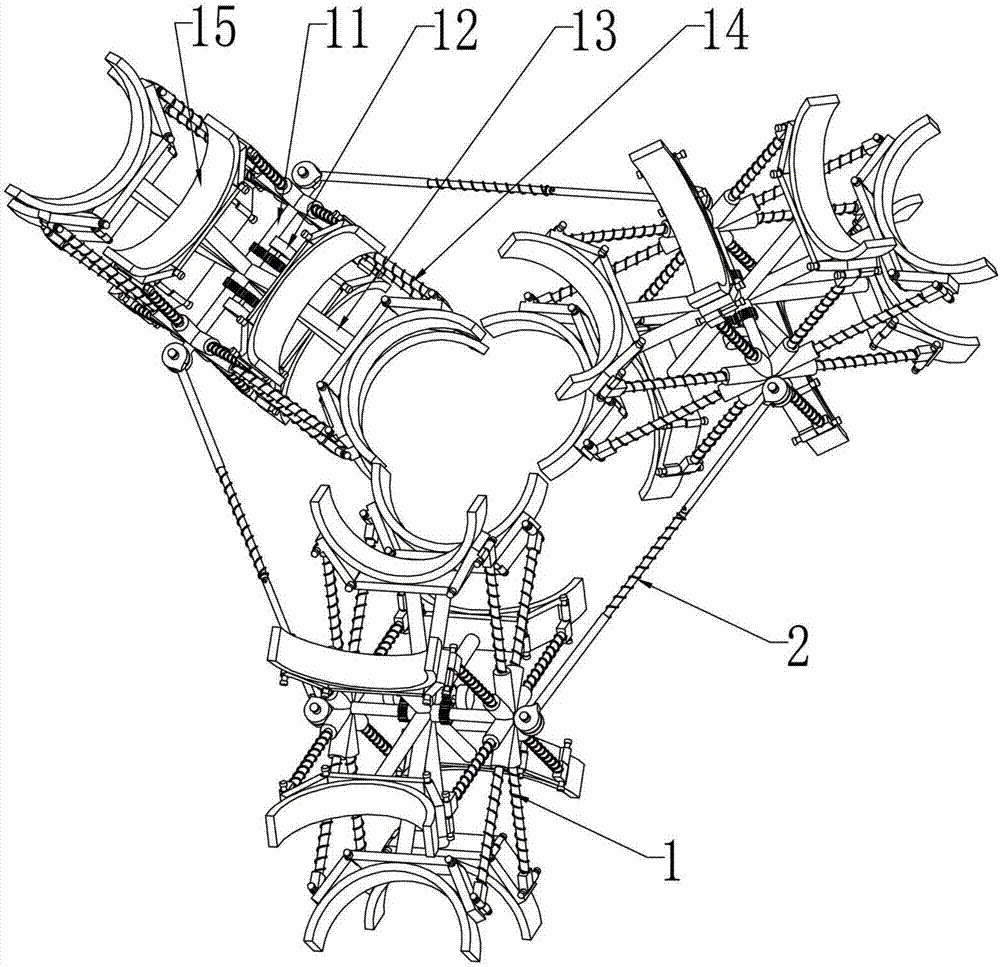
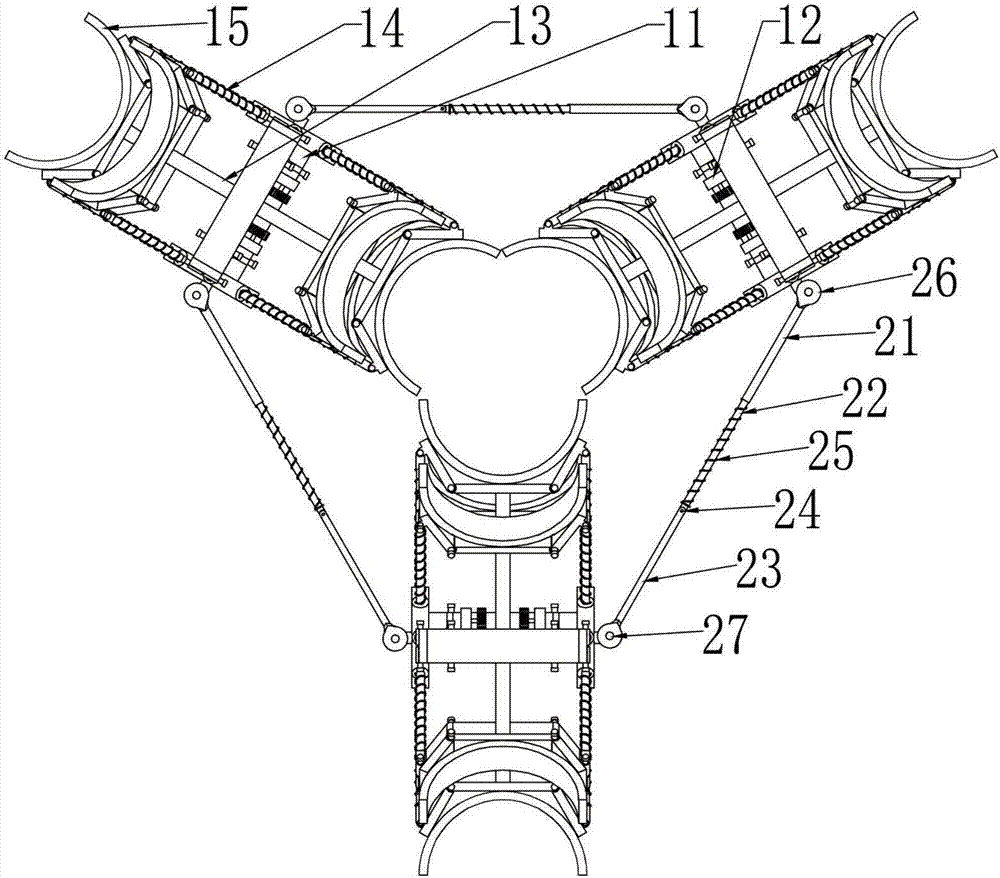
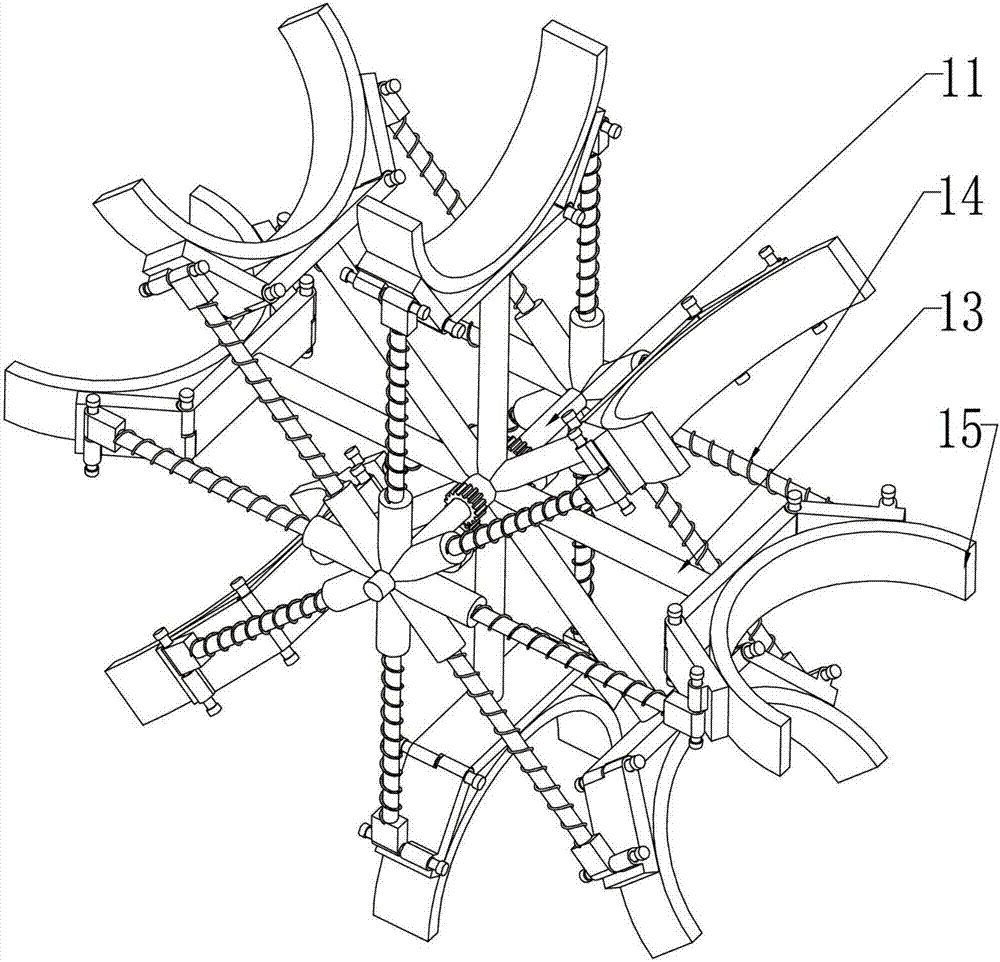
[0031] Such as figure 1 , figure 2 , image 3 As shown, a kind of low energy consumption climbing and picking robot for forestry of the present embodiment includes a climbing body 1 and a connecting body 2; the climbing rotating body 1 and the connecting body 2 each have the same three; the climbing The swivel 1 includes a central shaft 11, a motor 12, a central frame 13, an outer telescopic frame 14 and a climbing claw 15; the central shaft 11 includes a central shaft main body 111 and a central shaft lug 112; the central shaft main body 111 is a solid A cylindrical rod with a control device; the central axis lugs 112 are two ring plates fixed on the same plane at both ends of the central axis main body 111; the motor 12 is a motor with gears ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More