

Odometer method and device for sports equipment
A technology of sports equipment and odometer, which is applied in the direction of measuring devices, instruments, surveying and navigation, etc., can solve the problems of high error and low odometer accuracy, and achieve the effect of suppressing accumulated errors and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
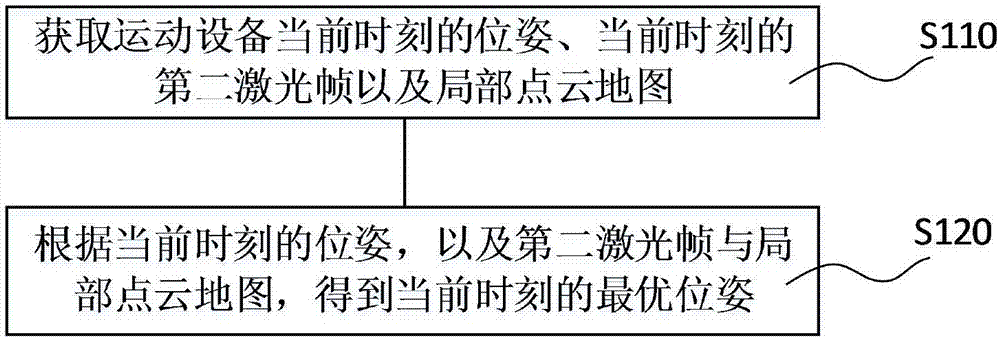
[0050] figure 1 is a schematic flowchart of the odometer method provided in this embodiment.
[0051] The devices in the application scene of this method include sports equipment, computing equipment, and laser scanning equipment and physical mileage equipment set on the sports equipment. Sports equipment can be mobile robots, sweeping robots, robotic toys, or smart homes that need to be moved and positioned indoors. Computing equipment is used to calculate various data, and the data sources are sports equipment, laser scanning equipment, physical mileage equipment, etc. The physical mileage device is used to detect and obtain the motion data of the sports equipment to estimate the change in the pose of the sports equipment over time, including the position change, angle change, etc., and is generally set on the sports equipment, such as a code wheel, other photoelectric encoders, or Other sensing elements that measure the displacement of moving equipment over a period of ti...
Embodiment 2
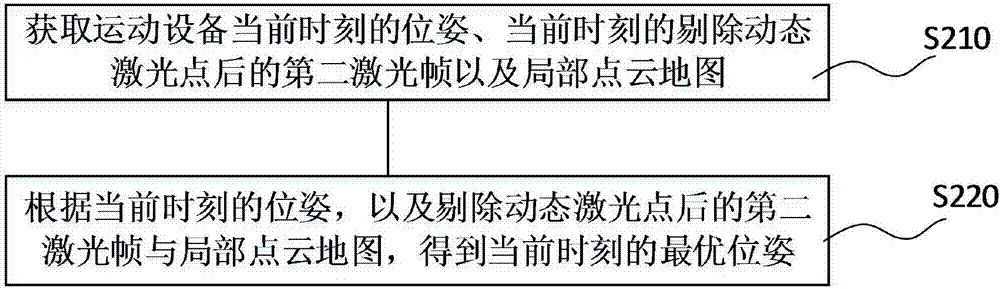
[0103] image 3 It is a schematic flow chart of Embodiment 2 of the odometer method of the present invention.
[0104] The odometer method of the present embodiment includes
[0105] Step S210: Obtain the current pose of the sports device, the current second laser frame after excluding laser dynamic points, and the local point cloud map.
[0106] A local probability grid map is introduced, and the probability value of the probability grid map is used as the basis for deleting dynamic points. Map the second laser frame to the local probability grid map. If the probability value of the grid where the laser point is located is less than the lowest probability value of the static grid, it is a dynamic grid, that is, the laser points in the grid are all dynamic laser points. Specifically, the following steps are included:
[0107] Step S211: Obtain the position coordinates of the laser point in the local probability grid map in the second laser frame according to the pose at the...
Embodiment 3
[0129] Figure 4 It is a schematic diagram of the module structure of the odometer device of the present invention.
[0130] An odometer device comprising
[0131] The first acquisition module acquires the pose of the sports equipment at the current moment;
[0132] The second acquisition module acquires the second laser frame at the current moment of the sports equipment;
[0133] The third acquisition module acquires the local point cloud map;
[0134] The first calculation module calculates the optimal pose at the current moment according to the pose at the current moment, as well as the second laser frame and the local point cloud map.
[0135] In this embodiment, as a further improvement, the first acquisition module is specifically configured to acquire a better pose at the current moment, specifically, the first acquisition module includes
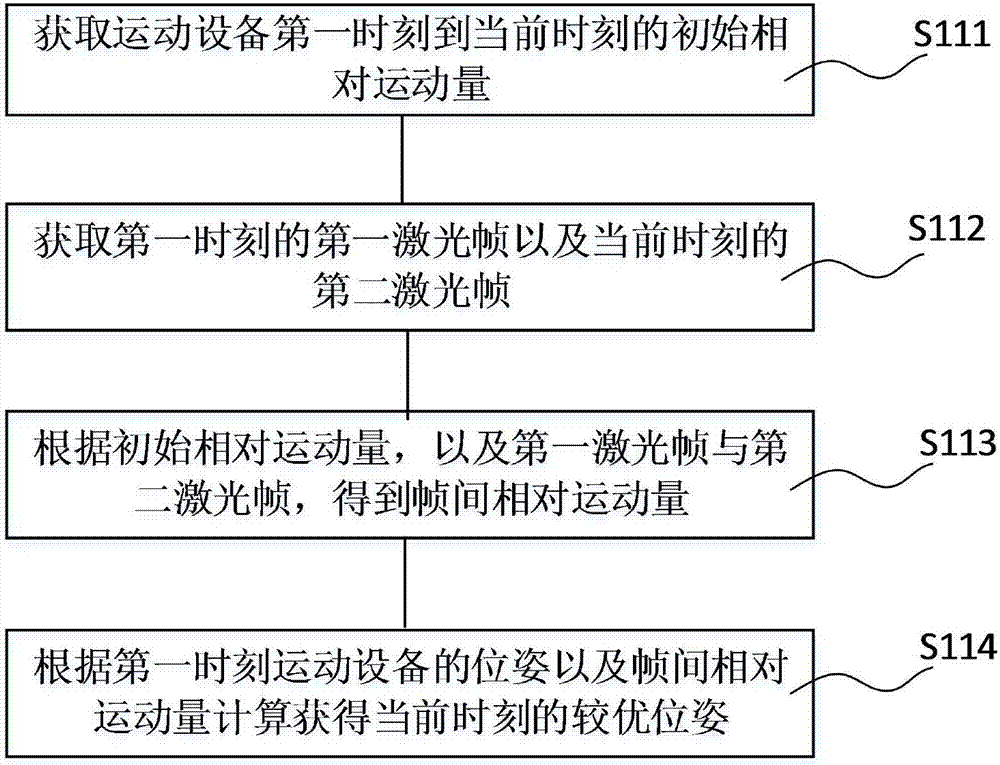
[0136] The first acquisition unit acquires the initial relative exercise amount of the sports equipment from the first moment ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More