

Path tracing control method, path tracing control device, and intelligent vehicle
A path tracking and control method technology, which is applied in vehicle position/route/height control, non-electric variable control, control/regulation system, etc., can solve the problem of sudden changes in the tracking path of zooming in and out, and the inability of unmanned vehicles to track the path, etc. Achieve the effect of improving robustness and enhancing stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to better understand the purpose, technical solutions, and technical effects of the present invention, the present invention will be further explained below in conjunction with the accompanying drawings and embodiments. At the same time, it is stated that the embodiments described below are only used to explain the present invention, not to limit the present invention.
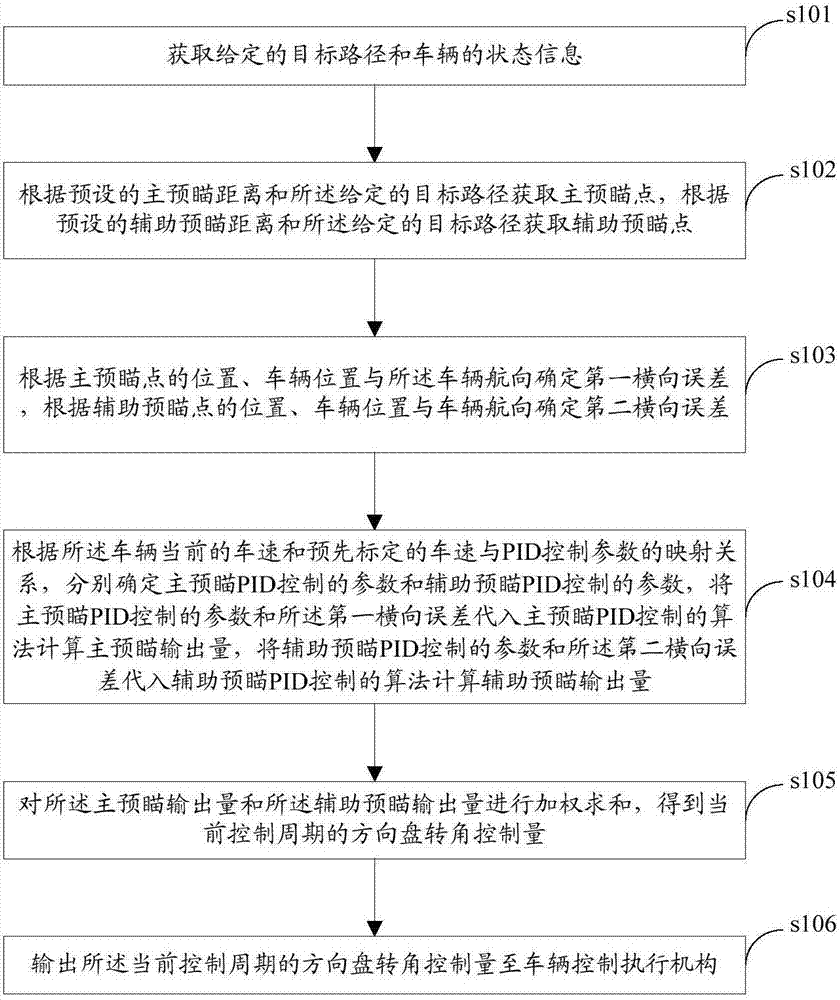
[0039] In one embodiment, such as figure 1 As shown, it is a flowchart of a path tracking control method according to an embodiment, including the steps:
[0040] s101: Acquire a given target route and state information of a vehicle; wherein the given target route includes at least one target route point, and the target route points are arranged in the order in which the vehicle travels to each target route point; The state information of the vehicle includes the position of the vehicle, the heading of the vehicle and the current speed of the vehicle.
[0041] When entering a control period, that is,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More