

Torque control method of industrial robot
An industrial robot and control method technology, applied in program control, general control system, control/regulation system, etc., can solve the problems of low safety, inability to avoid obstacles effectively, and low control accuracy, and achieve the effect of high safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings.
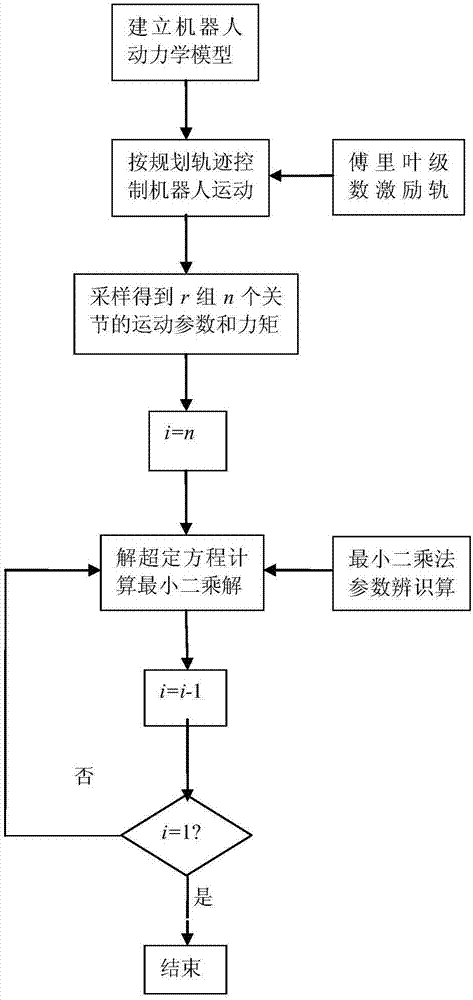
[0050] refer to figure 1 and figure 2, a torque control method for an industrial robot. First, an accurate robot dynamics model is established by identifying the kinematics and inertia parameters of each joint; then, the displacement of each joint angle when moving to the terminal posture is obtained by solving the inverse kinematics; finally, Taking the joint angular displacement as the motion distance, a sinusoidal jerk planning method is used to plan the velocity acceleration of each joint. The control torque in the motion path can be solved by substituting the velocity and acceleration into the dynamic model. The torque control method includes the following steps:
[0051] Step 1: Identification of dynamic parameters of industrial robots
[0052] The present invention adopts the overall identification method of testing the whole robot to identify the dynamic p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More