

Nonlinear system active disturbance rejection control method based on interference observer
A technology of disturbance observer and nonlinear system, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of low control accuracy, control method dependent on system model, etc., and achieve the effect of overcoming limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described in detail below with reference to the drawings and embodiments.
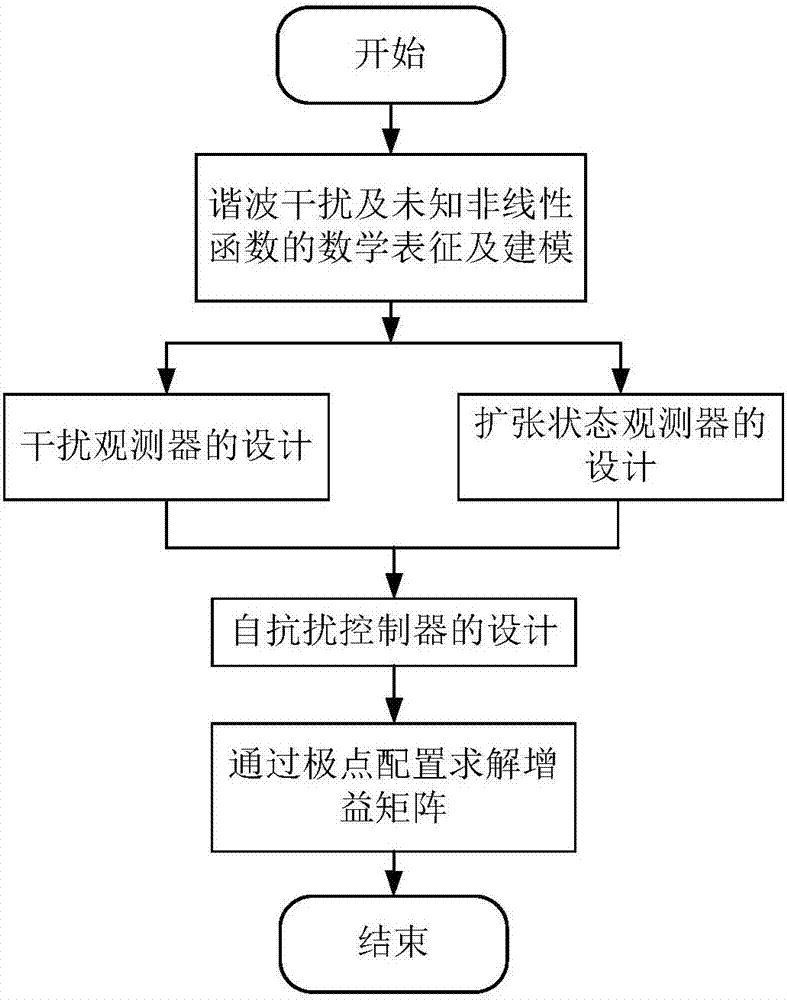
[0042] Such as figure 1 As shown, the specific implementation steps of the present invention are as follows:
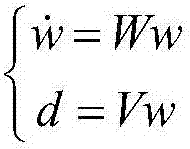
[0043] The first step is to mathematically characterize harmonic interference and unknown nonlinear functions, and establish an external model of harmonic interference:
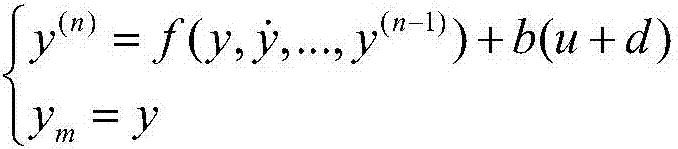
[0044] Consider the following single-input single-output nonlinear system with harmonic interference and unknown nonlinear functions:
[0045]
[0046] Where n> 0 is the order of the system, y represents the model output, y (n) Represents the nth derivative of y, Represents the first derivative of y; f(y,y (1) ,...,y (n-1) ) Represents a first-order derivable unknown nonlinear function, representing nonlinear dynamics; b is a known constant, u is the control input, and y m Represents measurement output; interference d represents harmonic interference with known frequency information, whic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More