An underwater beacon positioning method for an underwater vehicle
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology for underwater vehicles and positioning methods, which is applied in satellite radio beacon positioning systems, instruments, navigation, etc., and can solve problems such as position deviation and clock drift of underwater acoustic speed underwater beacons
Active Publication Date: 2021-07-09
HARBIN ENG UNIV
View PDF5 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0003] The purpose of the present invention is to propose an underwater vehicle based on the expectation maximization method in view of the unknown speed of sound in underwater single beacon positioning, the position deviation of underwater beacons and the clock drift of the underwater acoustic signal transceiver. underwater beacon positioning method
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
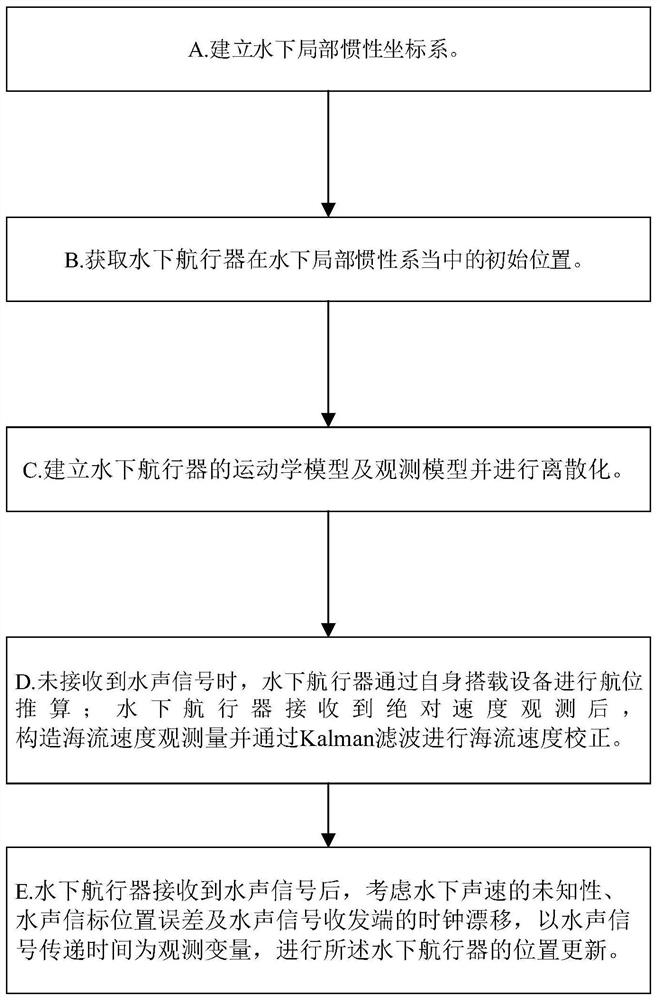
[0121] Embodiment 1, see attached figure 1 A kind of underwater beacon location method of underwater vehicle, comprises the following steps:
[0122] A. Take any point in the positioning area as the origin, set the east, north, and sky directions as x, y, and z axes respectively, and establish an underwater local inertial coordinate system;
[0123] B. Obtain the initial position of the underwater vehicle in the underwater local inertial system through the GPS system carried by the underwater vehicle;
[0124] C. Establish the kinematics model and observation model of the underwater vehicle and perform discretization;
[0125] The establishment method of the kinematic model is as follows:
[0126] Define the state vector as:
[0127] x=[x y v cx v cy ] T
[0128] Among them: x, y are the horizontal position of the underwater vehicle in the underwater local inertial coordinate system; v cx , v cy is the unknown current velocity;
[0129] Deriving x and adding the noi...
Embodiment 2
[0234] Embodiment 2, the algorithm pseudocode of the present invention is summarized as:
[0235]
Embodiment 3
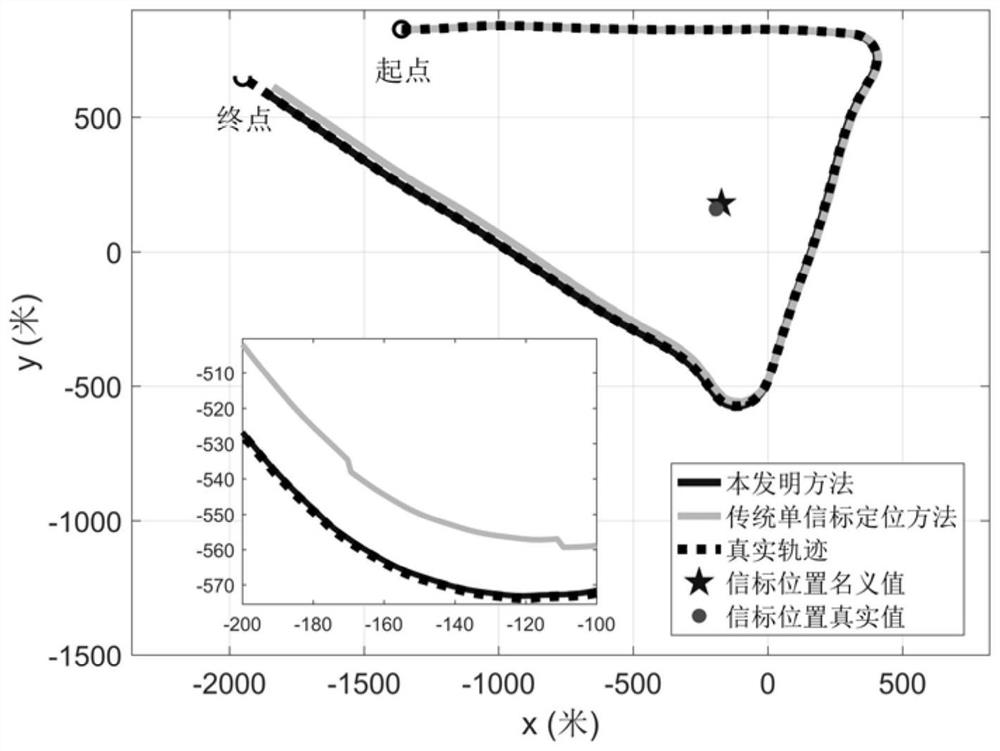
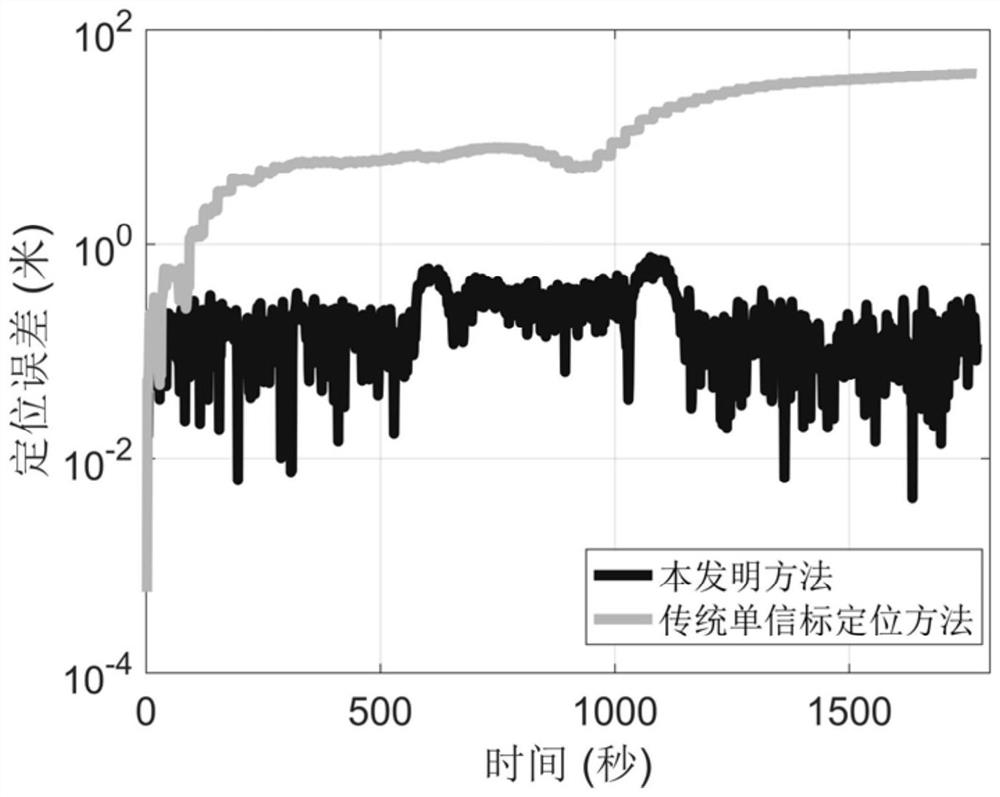
[0236] Example 3, using the method described in Example 1 to verify through experimental data.
[0237]As a comparison, this embodiment also shows the positioning results of the traditional underwater single-beacon positioning method. The method of collecting experimental data is as follows: the surface ship is equipped with GPS, hydrophone and compass, and performs two-dimensional movement on the water surface. The trajectory of the surface ship observed by GPS is used as a real reference, and the hydrophone receives the underwater acoustic signal emitted by the underwater acoustic beacon fixed on the bottom of the water, and obtains the transmission time of the underwater acoustic signal. Since the surface ship is not equipped with a Doppler velocimeter, the GPS track is used to make a difference and the heading angle measured by the electronic compass is used to simulate the ground speed of the aircraft observed by the Doppler velocimeter. In the experiment, the underwater...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention belongs to the technical field of underwater positioning, in particular to a positioning method for an underwater vehicle. The underwater acoustic beacon periodically broadcasts the underwater acoustic signal; when the underwater vehicle does not receive the underwater acoustic signal, it uses its own electronic compass, depth gauge and reads its own propeller speed information to perform dead reckoning, and when it receives After observing the absolute velocity measured by the mounted Doppler velocimeter, construct the ocean current velocity observation and correct the ocean current velocity through the Kalman filter; after the underwater vehicle receives the underwater acoustic signal, consider the unknown of the underwater sound velocity, The position error of the underwater acoustic beacon and the clock drift of the underwater acoustic signal transceiver are based on the extended Kalman filter algorithm and the expectation maximization algorithm, and the underwater acoustic signal transmission time is used as the observation variable to update the position of the underwater vehicle. The invention can ensure that the underwater vehicle still obtains ideal positioning performance under the condition of clock drift, beacon position and sound velocity setting errors.
Description
technical field [0001] The invention belongs to the technical field of underwater positioning, in particular to a positioning method for an underwater vehicle. Background technique [0002] Accurate position feedback is the basis for underwater vehicles to complete established underwater tasks. Due to the rapid attenuation of underwater electromagnetic wave signals, the GNSS system, which is widely used in land and sky positioning, cannot be applied underwater. The existing mainstream underwater positioning methods include dead reckoning methods represented by inertial navigation and underwater acoustic positioning methods represented by long baseline positioning. Among them, inertial navigation equipment tends to produce large cumulative errors over time, and cannot be used for underwater positioning for a long time, and high-precision inertial navigation equipment is extremely expensive, which limits its application in underwater vehicles. The existing mainstream underwa...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More