

Underwater beacon positioning method of underwater vehicle
A technology of underwater vehicle and positioning method, which is applied to satellite radio beacon positioning systems, instruments, navigation and other directions, and can solve problems such as position deviation and clock drift of underwater beacons at the speed of sound and sound.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
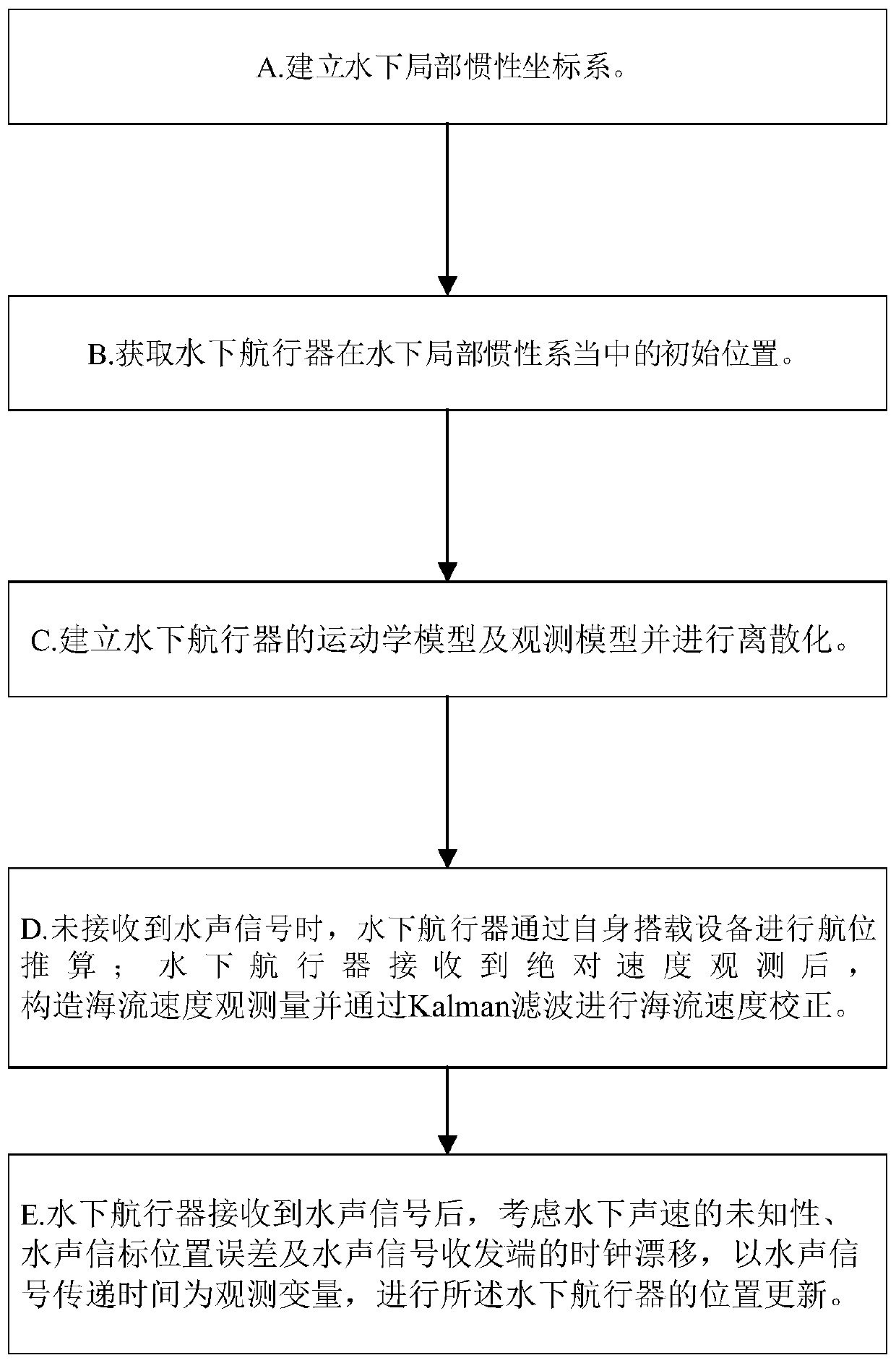
[0121] Embodiment 1, see attached figure 1 A kind of underwater beacon location method of underwater vehicle, comprises the following steps:
[0122] A. Take any point in the positioning area as the origin, set the east, north, and sky directions as x, y, and z axes respectively, and establish an underwater local inertial coordinate system;
[0123] B. Obtain the initial position of the underwater vehicle in the underwater local inertial system through the GPS system carried by the underwater vehicle;
[0124] C. Establish the kinematics model and observation model of the underwater vehicle and perform discretization;
[0125] The establishment method of the kinematic model is as follows:
[0126] Define the state vector as:
[0127] x=[x y v cx v cy ] T
[0128] Among them: x, y are the horizontal position of the underwater vehicle in the underwater local inertial coordinate system; v cx , v cy is the unknown current velocity;
[0129] Deriving x and adding the noi...
Embodiment 2
[0234] Embodiment 2, the algorithm pseudocode of the present invention is summarized as:
[0235]
Embodiment 3
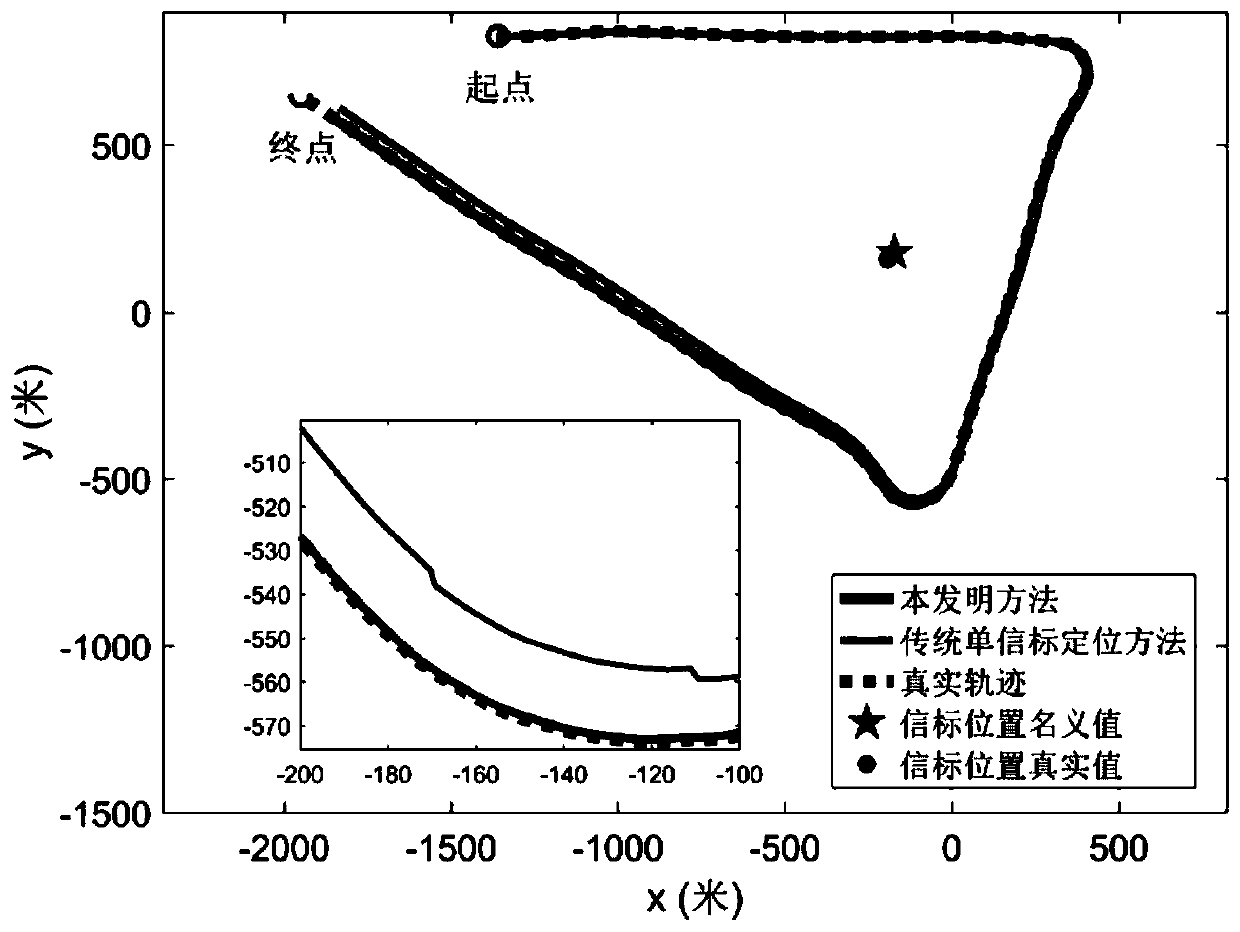
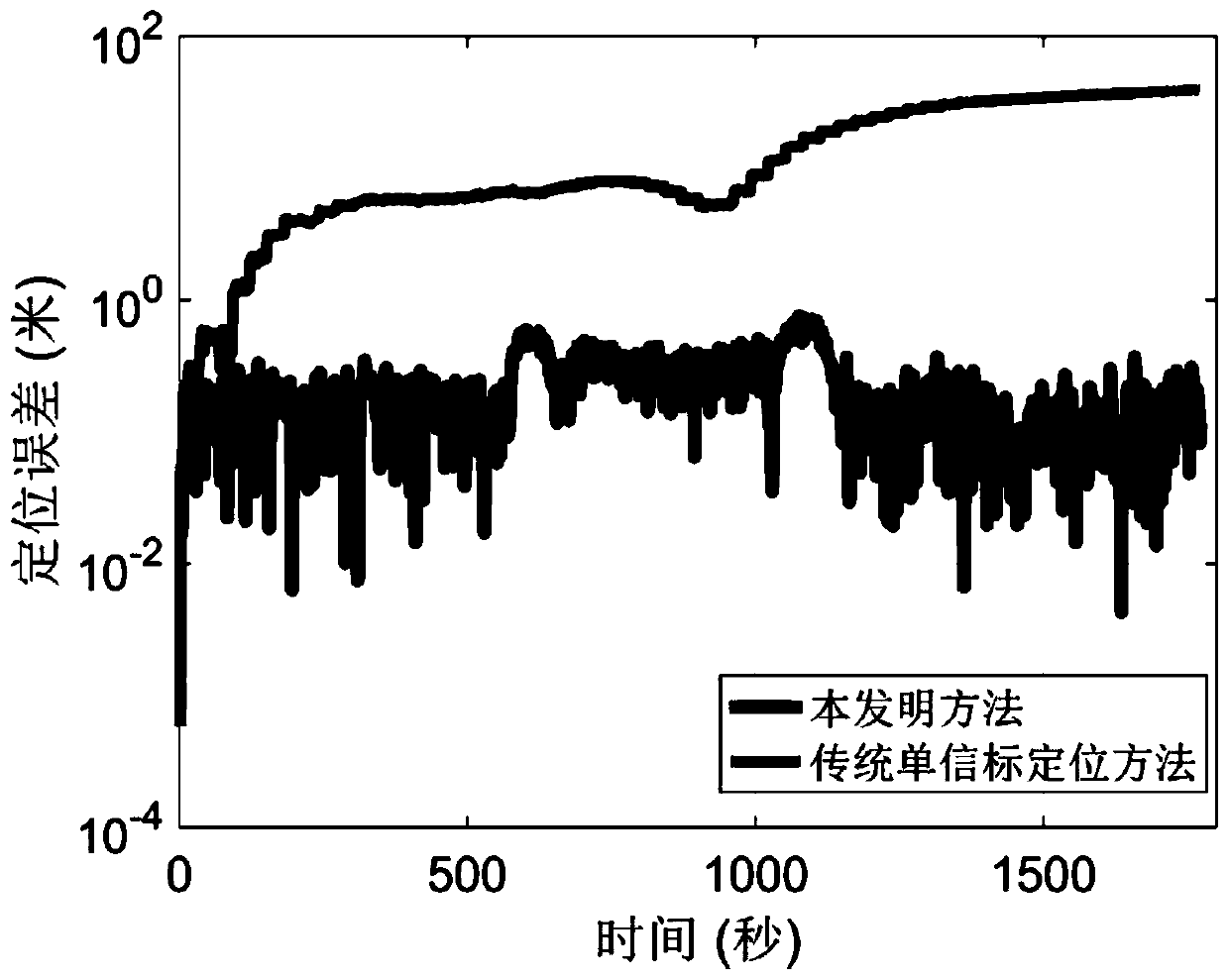
[0236] Example 3, using the method described in Example 1 to verify through experimental data.
[0237]As a comparison, this embodiment also shows the positioning results of the traditional underwater single-beacon positioning method. The method of collecting experimental data is as follows: the surface ship is equipped with GPS, hydrophone and compass, and performs two-dimensional movement on the water surface. The trajectory of the surface ship observed by GPS is used as a real reference, and the hydrophone receives the underwater acoustic signal emitted by the underwater acoustic beacon fixed on the bottom of the water, and obtains the transmission time of the underwater acoustic signal. Since the surface ship is not equipped with a Doppler velocimeter, the GPS track is used to make a difference and the heading angle measured by the electronic compass is used to simulate the ground speed of the aircraft observed by the Doppler velocimeter. In the experiment, the underwater...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More