

High-order variable structure control method for transverse stability of distributed driving electric automobile based on grey prediction
A technology of lateral stability and variable structure control, applied in electric vehicles, control drive, adaptive control, etc., can solve problems such as increased chattering of the control system, deterioration of control system performance, loss of control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] In the following, in conjunction with the accompanying drawings, the method of high-level variable structure control for the lateral stability of a distributed drive electric vehicle based on gray prediction will be further explained.
[0083] A high-order variable structure control method for the lateral stability of a distributed drive electric vehicle based on gray prediction includes the steps:
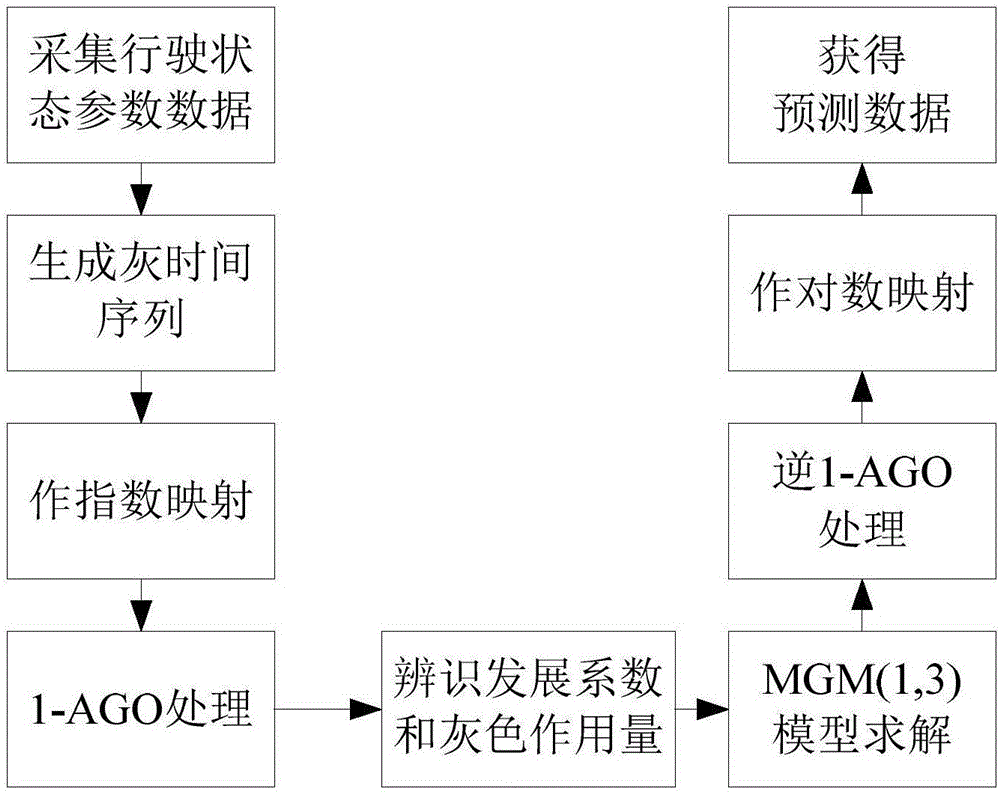
[0084] S1, establish the gray model MGM(1,3) to predict the vehicle driving state parameters (yaw rate, center of mass side slip angle), the specific process is as follows figure 1 Shown
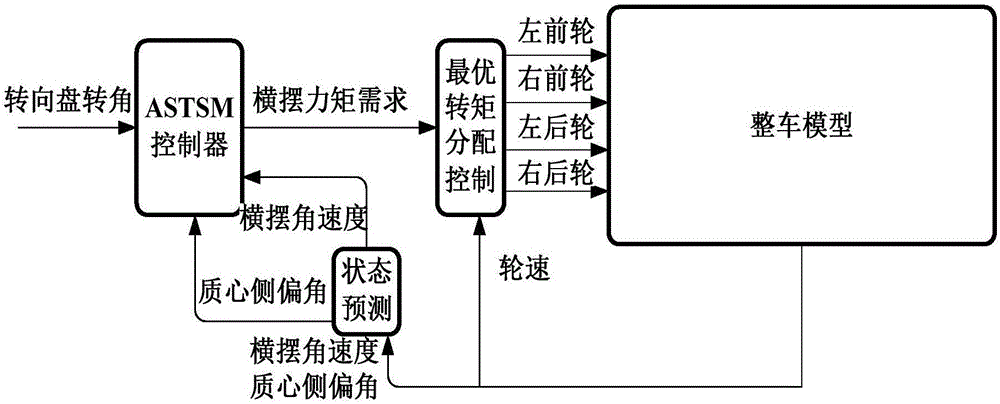
[0085] S2, based on the ASTSM control algorithm, design the upper controller of the control system;
[0086] S3: Perform stability analysis on the upper controller of S2 and provide stability conditions;
[0087] S4, design the lower controller of the control system based on an optimal algorithm.
[0088] Further, the specific process of S1 is:
[0089] S1.1, data processing:
[0090] Suppose the ori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More