Drivable Area Recognition Method Based on Image and Map Matching Based on Positioning
A driving area and map matching technology, which is applied in transportation and packaging, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve problems such as difficult implementation, achieve simple structure, avoid non-real-time, Versatile effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and specific examples. It should be pointed out that the following is only an optimized technical solution and design principle for illustration, but the protection scope of the present invention is not limited thereto.
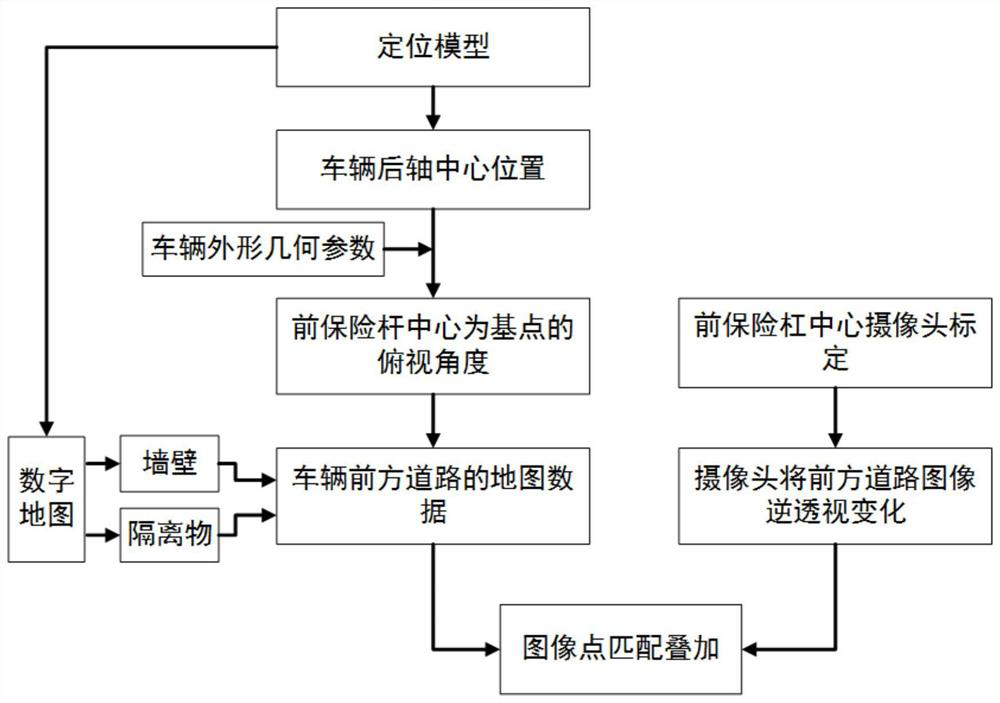
[0020] The present invention proposes a drivable area recognition method based on location-based image and map matching adapted to underground parking lot ramps. The positioning coordinates of the current vehicle in the ramp are obtained by the autonomous vehicle internal positioning system. Based on this positioning coordinates, the The map data ahead of the current position is extracted from the high-precision map of the ramp, and at this time the recognition system extracts the image from the camera in the middle of the front bumper of the autonomous vehicle, and points match the map data of the current position with the camera image to obtain the front...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More