

Multi-approach ball picking-up and serving robot control system
A control system and robot technology, applied in control/adjustment system, two-dimensional position/channel control, non-electric variable control, etc., can solve problems such as the inability to pick up the ball autonomously, the inability to move autonomously, and the difficulty of carrying it. The effect of smooth speed change, fast conversion speed and fast response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below with reference to the accompanying drawings and examples.
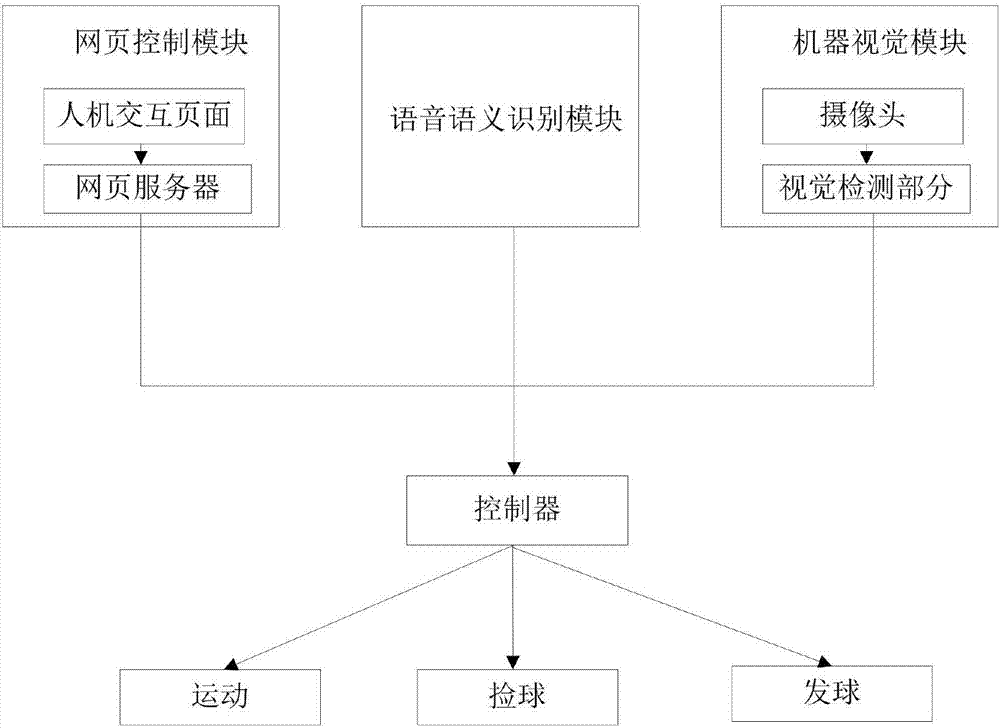
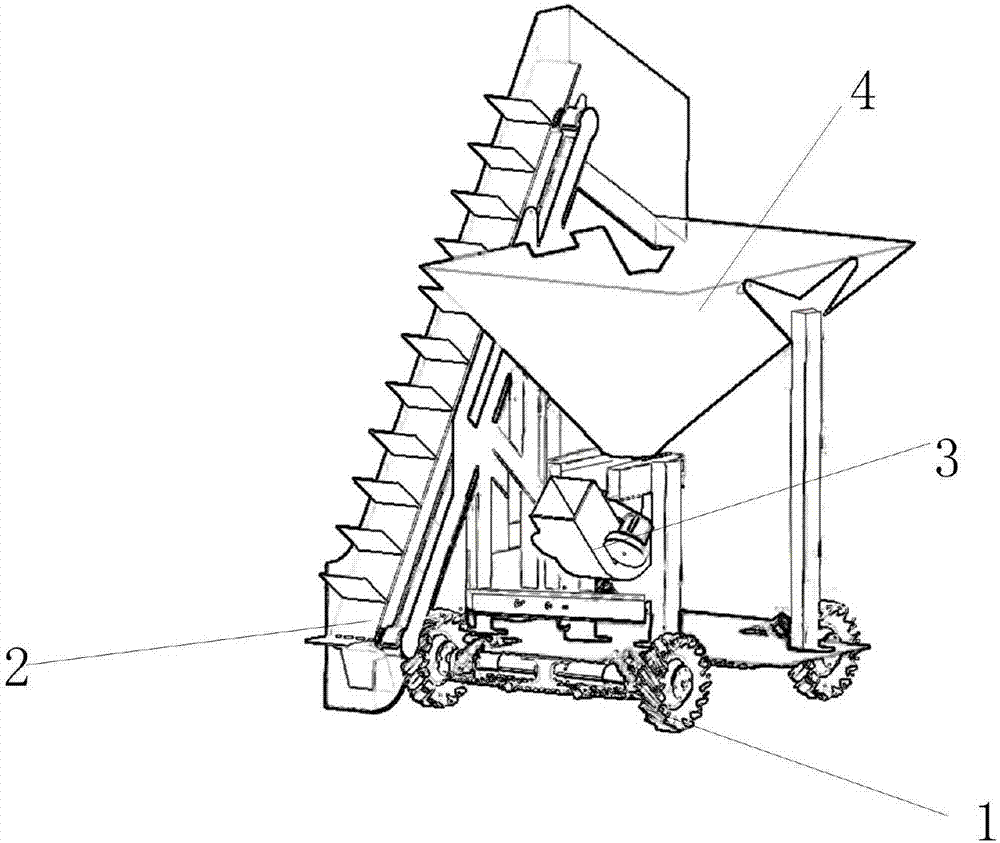
[0036] On the same day, the applicant filed a patent application titled "An Intelligent Tennis Robot". The robot includes a moving mechanism 1, a ball picking mechanism 2, and a serving mechanism 3; and wheels; the ball picking mechanism 2 includes a conveyor belt, a reduction motor, a ball storage basket 4 and a transmission frame; the service mechanism 3 includes a service motor, a friction wheel and a service pipeline; wherein, the top of the transmission frame is provided with a ball groove, and the transmission machine The bottom end of the frame is provided with a goal slot, the motion motor is connected with the drive mechanism and placed on the motion chassis, the drive mechanism is connected with the wheels, the support frame of the motion chassis is connected with the transmission frame of the ball picking mechanism and the ball delivery pipeline ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More