

A charging method and system for a robot
A charging method and robot technology, applied in the direction of charging/discharging secondary batteries, circuits, current collectors, etc., to avoid potential safety hazards
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
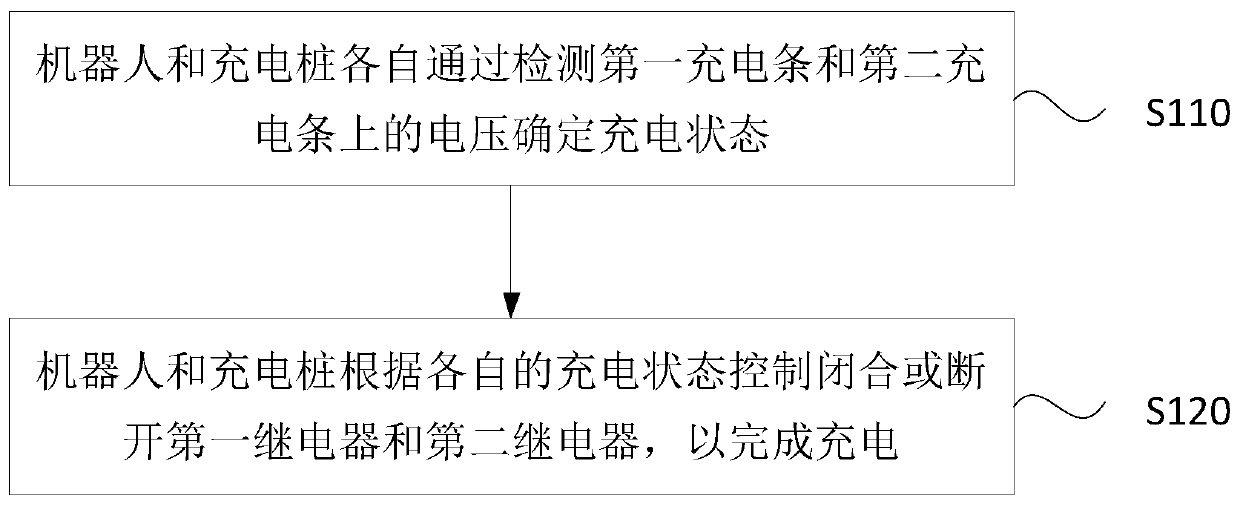
[0026] Figure 1a It is a flowchart of a charging method for a robot in Embodiment 1 of the present invention. This embodiment is applicable to charging a robot. The method can be executed by a robot and / or a charging pile, and can be implemented in the form of software and / or hardware. accomplish. The robot has a first charging bar, the charging post has a second charging bar, the robot also has a first relay connected to the first charging bar, and the charging post also has a second relay connected to the second charging bar;
[0027] Such as Figure 1a As shown, the method specifically includes:
[0028] S110, the robot and the charging post respectively determine a charging state by detecting voltages on the first charging bar and the second charging bar.
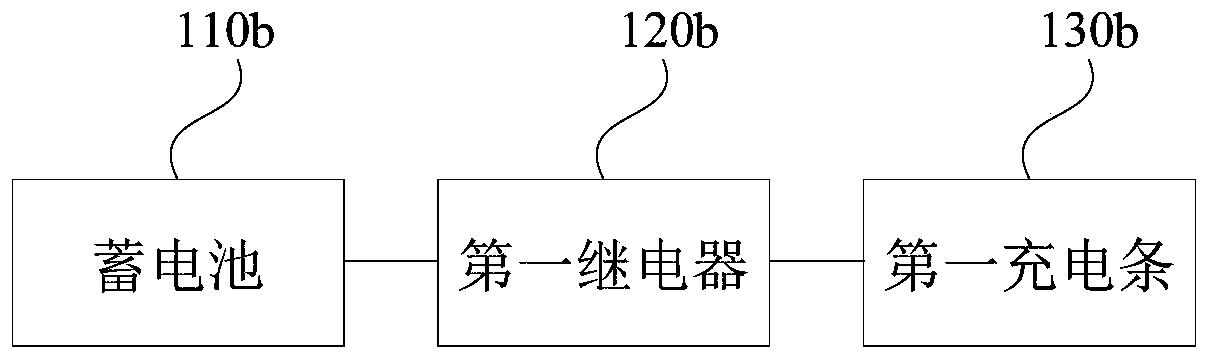
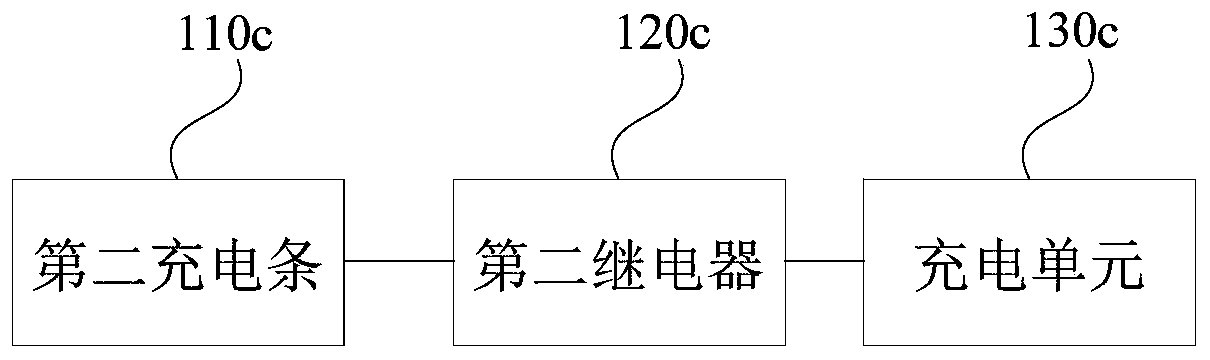
[0029] Figure 1b It is a structural schematic diagram of a robot in a robot charging method in Embodiment 1 of the present invention. Such as Figure 1b As shown, the robot has a first charging bar 130b, and the r...
Embodiment 2
[0036] Figure 2a It is a flow chart of the robot end of a robot charging method in Embodiment 2 of the present invention. This embodiment is optimized on the basis of the foregoing embodiments. Specifically, the method is suitable for the automatic charging of the robot by contacting the charging pile.
[0037] The method specifically includes:
[0038] S210. The robot detects a first voltage value on the first charging bar.
[0039] Preferably, before the robot detects the first voltage value on the first charging strip, the method further includes:
[0040] The robot detects its own power, and when the power is lower than a preset threshold, the robot is controlled to move to connect with the charging pile.
[0041] The robot detects the power of its own battery. When the power is lower than the preset threshold, it controls the movement of the robot to find and connect to the charging pile. The robot and the charging pile are connected through the contact between the f...
Embodiment 3
[0069] Figure 3a It is a flow chart of a robot charging method in Embodiment 3 of the present invention. This embodiment is optimized on the basis of Embodiment 1. Specifically, the method is suitable for the robot to be manually charged by connecting to a power source.
[0070] The method specifically includes:
[0071] S510. The robot detects a first current value on the first charging bar.
[0072] The robot detects the first current value on the first charging strip to determine whether the robot is in a charging state.
[0073] S520. The robot detects a fourth voltage value on the first charging bar.
[0074] The robot detects the fourth voltage value on the first charging strip to determine whether the robot is in an automatic charging state.
[0075] S530. When the first current value is within a third preset range and the fourth voltage value is within a fourth preset range, the robot detects a fifth voltage value of the manual charging interface.
[0076] Speci...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More