

Quaternion all-angle conversion Euler angle acquisition method facing large attitude maneuver
A technology of attitude quaternion and attitude maneuvering, which is applied in the direction of indicating/recording actions, measuring devices, instruments, etc. It can solve the difficulty of converting quaternion to Euler angle, cannot realize the representation of Euler angle, and is not one-to-one correspondence relationship issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The present invention will be further described below in conjunction with accompanying drawing:
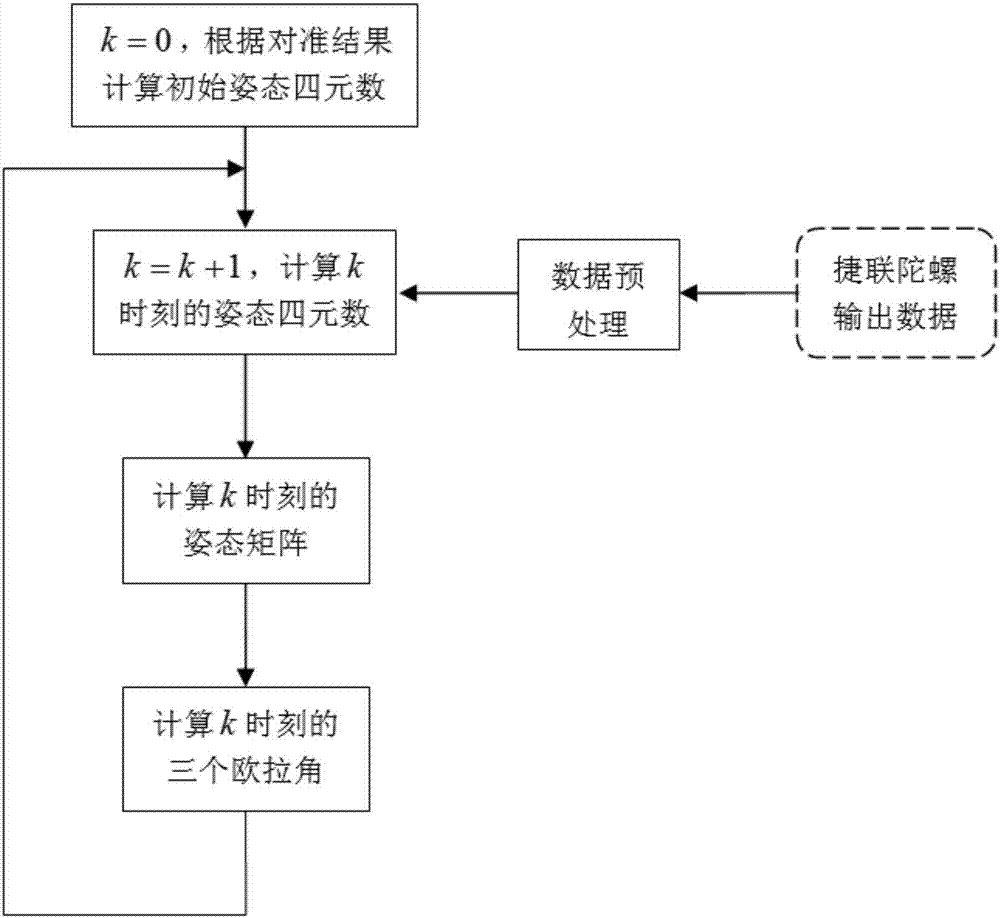
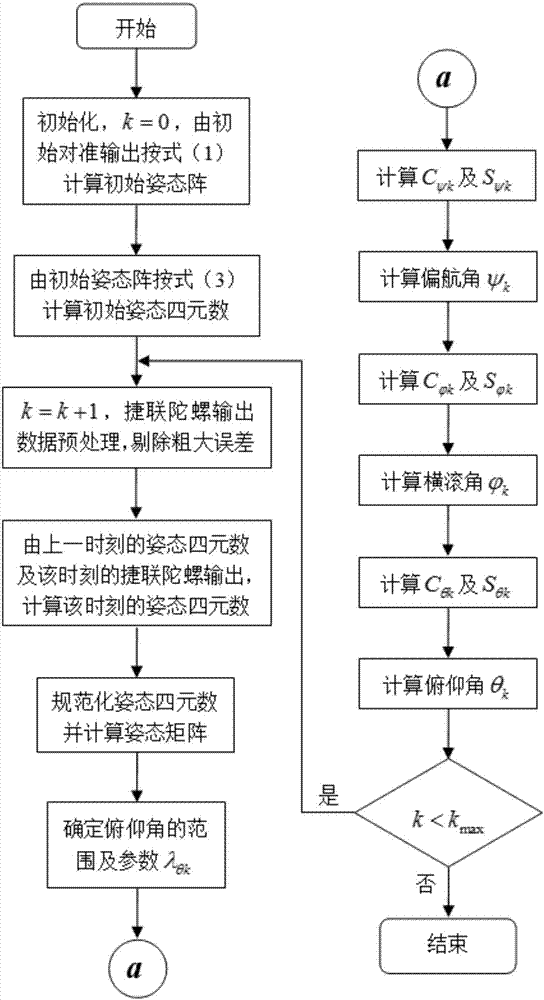
[0089] The invention relates to a method for obtaining Euler angles of quaternion full-angle domain conversion oriented to large-attitude maneuvers. The method calculates the initial attitude matrix according to the initial alignment result, and obtains the initial attitude quaternion; the strapdown gyroscope after preprocessing The output data and the attitude quaternion at the previous moment are updated to obtain the attitude quaternion at this moment; the attitude matrix of the aircraft is calculated from the attitude quaternion, and the sine value of the yaw angle is calculated according to the range of the pitch angle and the elements of the attitude matrix and cosine value, the yaw angle is calculated from the sine and cosine values of the yaw angle; then the sine and cosine values of the roll angle are obtained from the yaw angle and attitude matrix elements, whi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More