

An underwater fetching robot
A technology of robots and steering gears, which is applied to underwater ships, underwater operation equipment, motor vehicles, etc., can solve the problems of single camera angle, single ability, and high cost, and achieve the effect of flexible movement and increased range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below in conjunction with illustrations and specific embodiments.
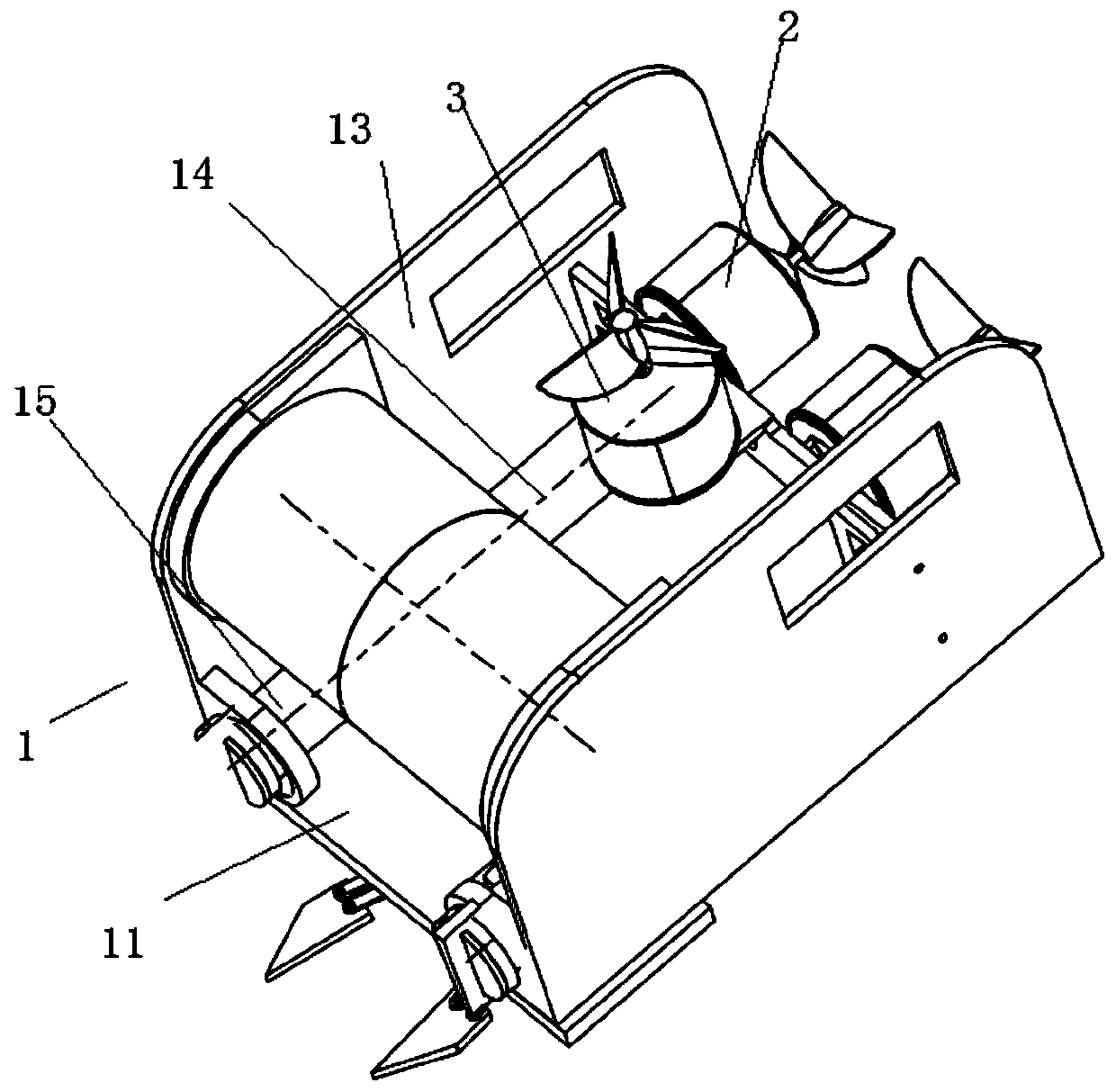
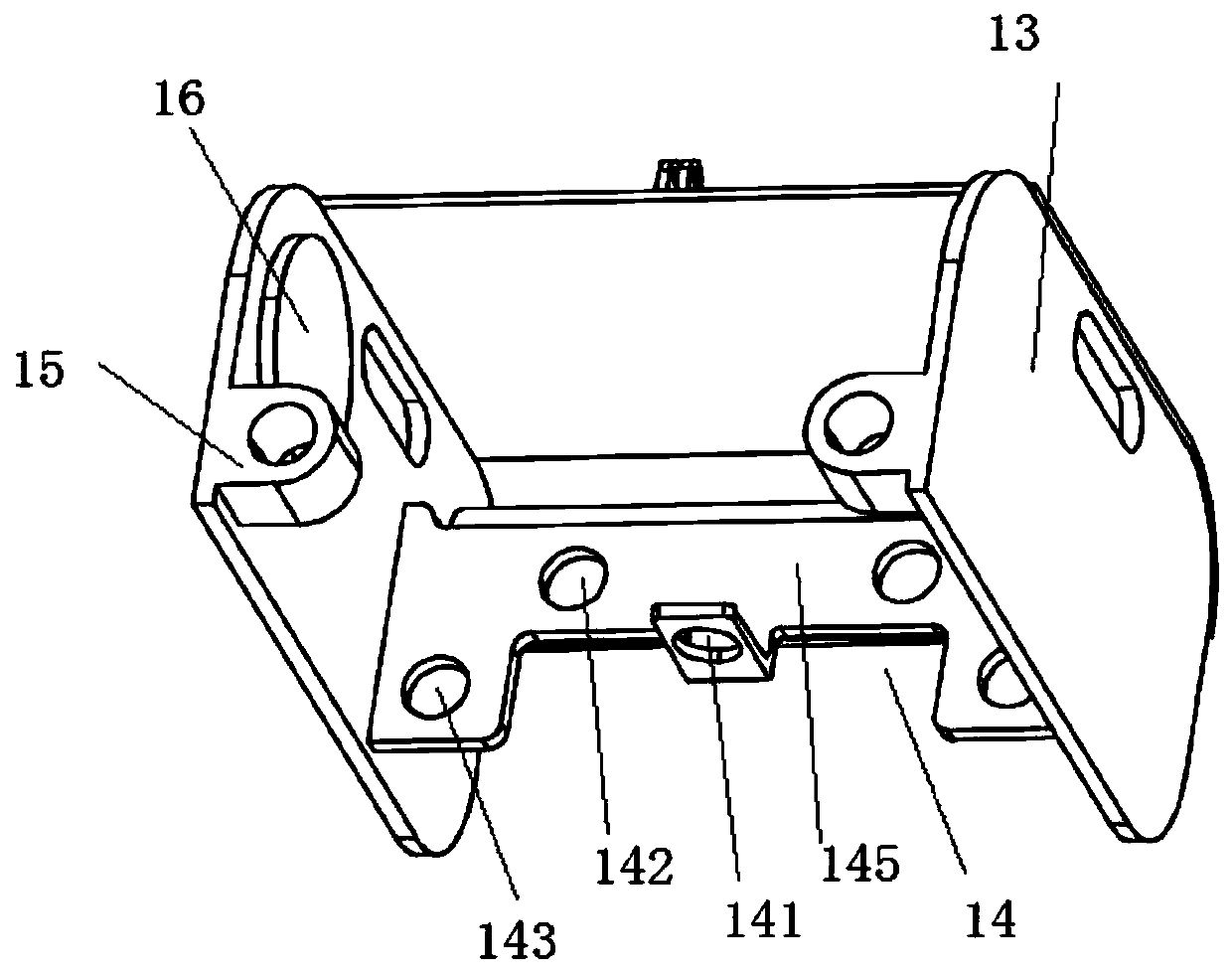
[0033] Such as Figure 1 to Figure 5 As shown, a kind of underwater fetching robot that the present invention proposes comprises carrier part 1, and described carrier part 1 comprises top case 11, and the side of described top case 11 is connected with circular arc plate, and described carrier part 1 also comprises Two side plates 13, the side plates 13 are attached to the arc surface of the arc plate, the two side plates 13 are connected by the propeller support 14, and a battery compartment fixing frame protrudes from the inner side of the side plates 13 15 and sealed cabin fixing seat 16;
[0034] The propeller support 14 includes a main body plate 141, two horizontal propeller concave holes 142 are opened on the surface of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More