Four-degree-of-freedom series movement simulation platform
A motion simulation, series-type technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as occasions where it is difficult to apply high-speed motion simulation, small motion space, and inability to achieve large-angle rotation, achieving simple structure and motion. Spacious, easy-to-control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
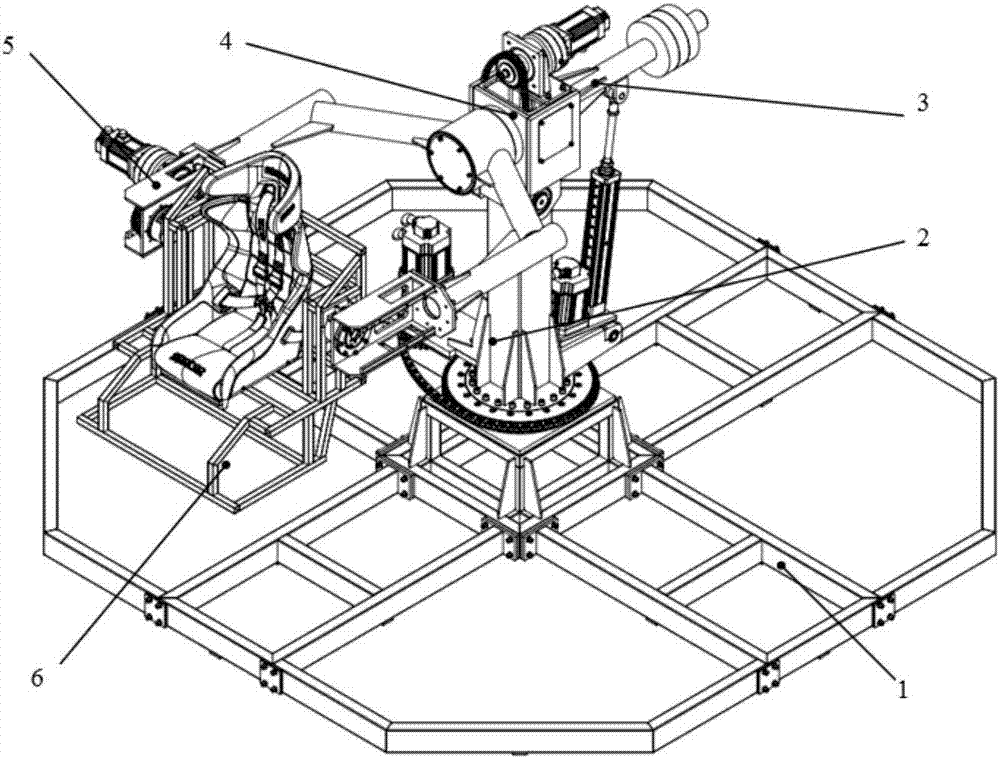
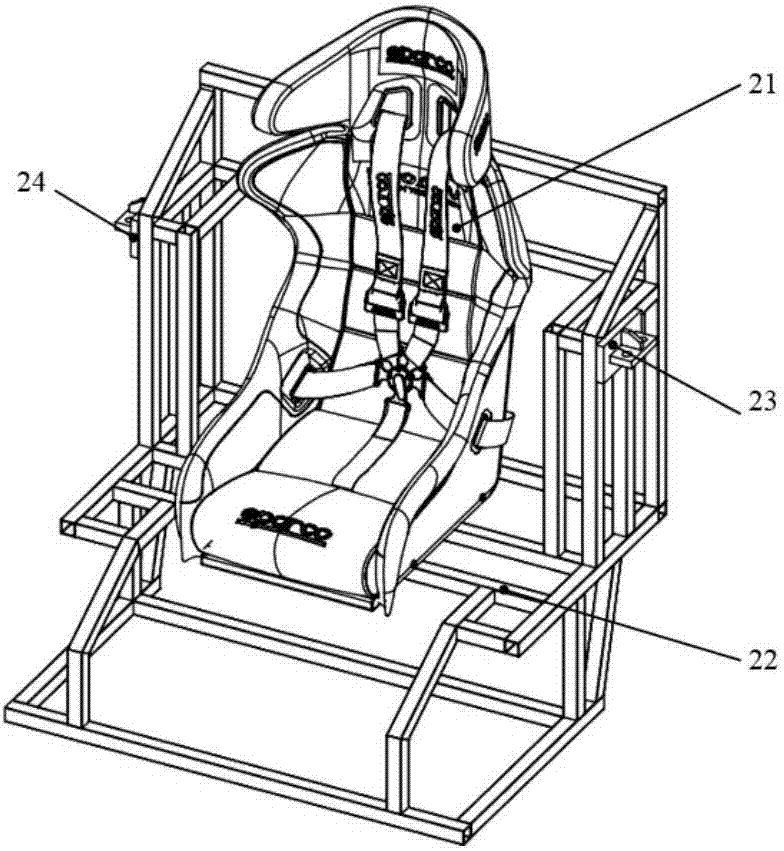
[0045] As shown in the figure, a four-degree-of-freedom serial motion simulation platform includes: an intermediate base 1 , a yaw rotary joint 6 , a heave rotary joint 5 , a roll rotary joint 3 , a pitch rotary joint 4 and a motion simulation cabin 2 . Such as image 3 As shown, the motion simulation cabin 2 includes a seat 21, a mounting frame 22, a reinforcement plate I23 and a reinforcement plate II24; the seat 21 is welded and fixed inside the mounting frame 22, and the left and right sides of the mounting frame 22 A reinforcing plate I23 and a reinforcing plate II24 are respectively welded. The mounting frame 22 is a frame body welded by cold-formed square hollow section steel.
[0046] Such as Figure 5 to Figure 7 As shown, the driving shaft 412 and the driven shaft 416 of the pitch and slewing joint 4 are connected to the motion simulation cabin 2 through mounting plate screws. The motion simulation cabin 2 is arranged in the pitch and swivel joint 4 and can realiz...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap