

Speech interaction method, speech interaction device and robot
A voice interaction and robot technology, applied in the field of robotics, can solve the problems that robots cannot automatically stand, intelligence, and anthropomorphism need to be improved, and achieve the effect of being conducive to accurate acquisition and optimal pickup angle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0031] Embodiment 1 of the present invention provides a voice interaction method, which is applied to a robot. In the embodiment of the present invention, the robot is usually designed to be of a height similar to that of an ordinary adult, such as 165 centimeters in height. In order to facilitate sound pickup, a circular microphone array is usually used for sound pickup, such as a 6-mic solution. The array is placed at a certain position on the head, such as the top of the head, placed horizontally, and the main microphone (microphone No. 0) is located in the center of the front of the head; the microphone array The specified beam enhancement direction is in the 0° direction. After the sound signal is obtained through the microphone array, automatic speech recognition (ASR auto speech recognition) can be performed to locate the angle of the sound source and judge the sound energy. The speech recognition engine is waken up for a long time. It has two mechanisms: one is to st...
Embodiment 2
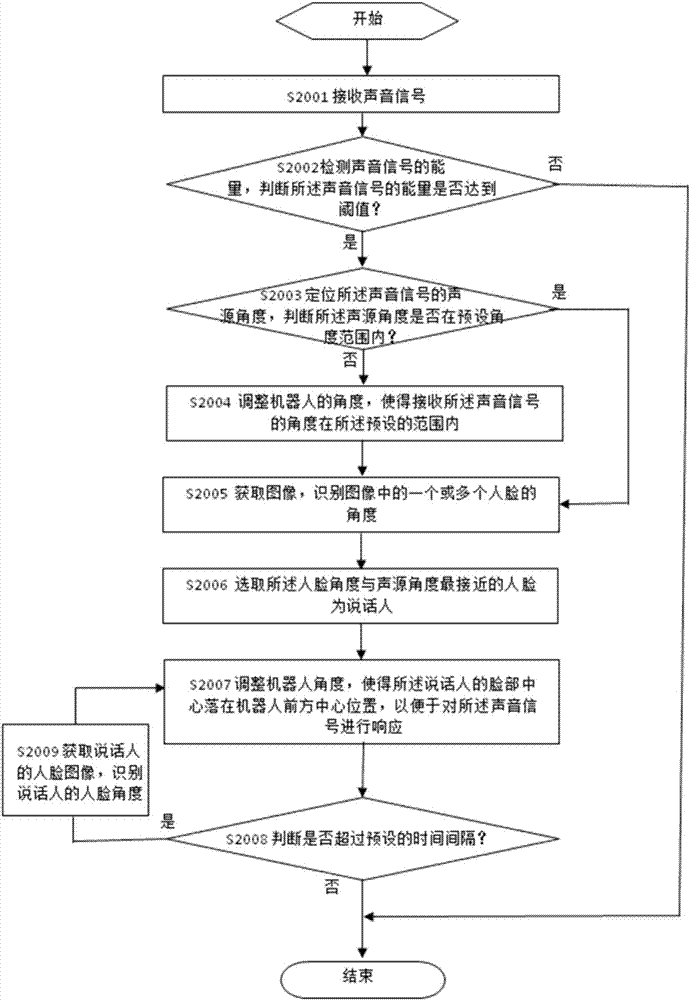
[0046] Embodiment 2 of the present invention provides a voice interaction method, which is applied to a robot. refer to figure 2 , which is a schematic flowchart of a voice interaction method provided by an embodiment of the present invention.
[0047] Step S2001: Receive a sound signal.
[0048] In the embodiment of the present invention, the robot is usually designed to be of a height similar to that of an ordinary adult, such as 165 centimeters in height. In order to facilitate the reception of sound signals, a circular microphone array is usually used for sound pickup, such as the 6-microphone solution. The array is located at a certain position on the head, such as the top of the head, placed horizontally, and the main microphone (microphone 0) is located in the center of the front of the head; the microphone The beam enhancement direction specified by the array is in the 0° direction.
[0049] Step S2002: Detect the energy of the sound signal, and determine whether t...
Embodiment 3
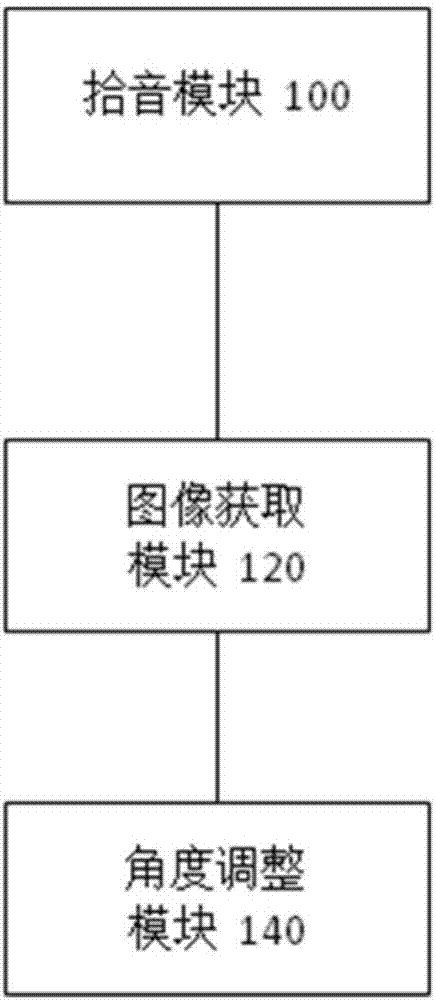
[0070] Embodiment 3 of the present invention provides a voice interaction device, refer to image 3 . The voice interaction device is applied to a robot, and includes: a sound pickup module 100 , an image acquisition module 120 , and an angle adjustment module 140 . The voice interaction method provided in the first and second embodiments above can be realized by the voice interaction device provided in this embodiment.
[0071] The sound pickup module 100 is used for judging whether the sound source angle of the received sound signal is within the preset sound source angle range of the robot.
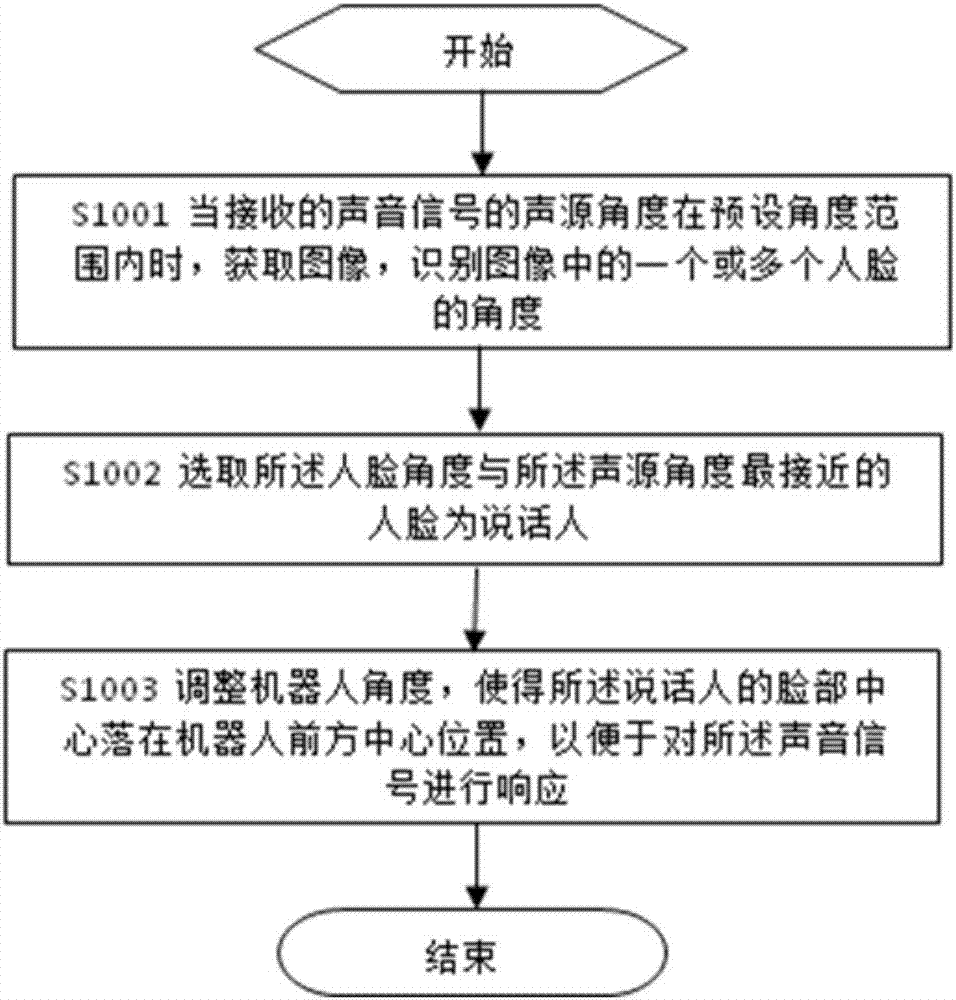
[0072] The image acquisition module 120 is used to acquire an image when the sound source angle of the received sound signal is within the preset angle range of the robot, identify the angle of one or more faces in the image, and select the angle between the face angle and the robot. The face with the closest sound source angle is the speaker.
[0073] The angle adjustment module 14...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More