Bearing-only navigation-based closed ring convex optimization optimal rendezvous guidance method
A technology of rendezvous guidance and convex optimization, applied in the field of navigation and guidance, can solve the problems of high mass, high cost and large volume, and achieve the effect of easy engineering application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in further detail below in conjunction with the accompanying drawings.
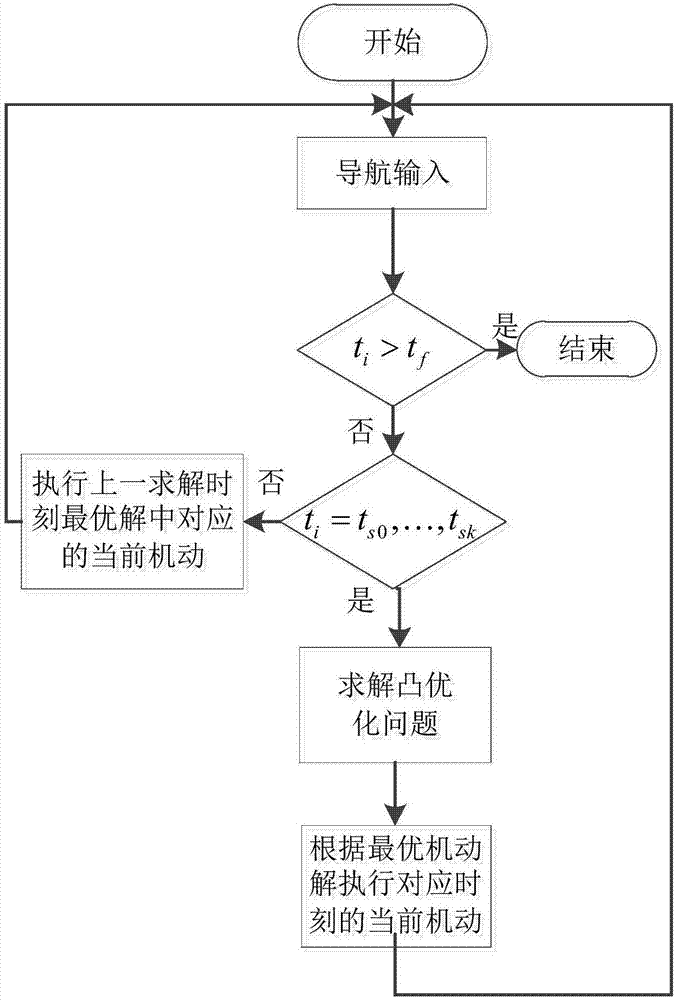
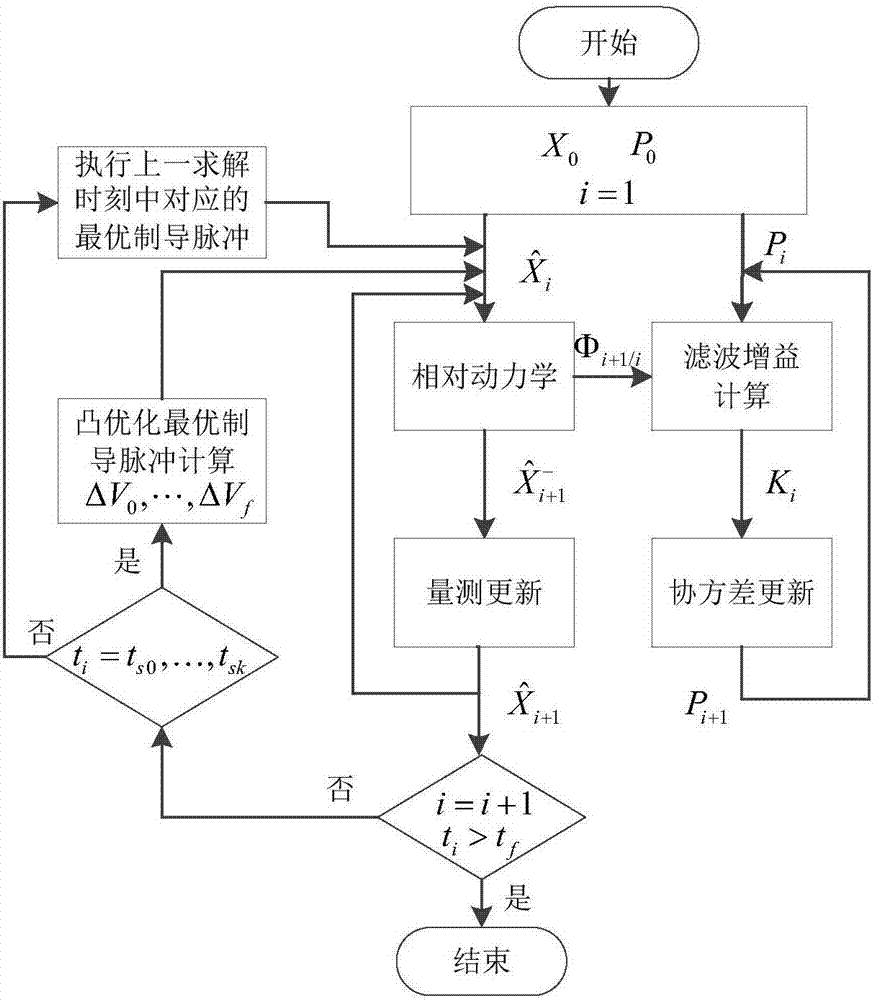
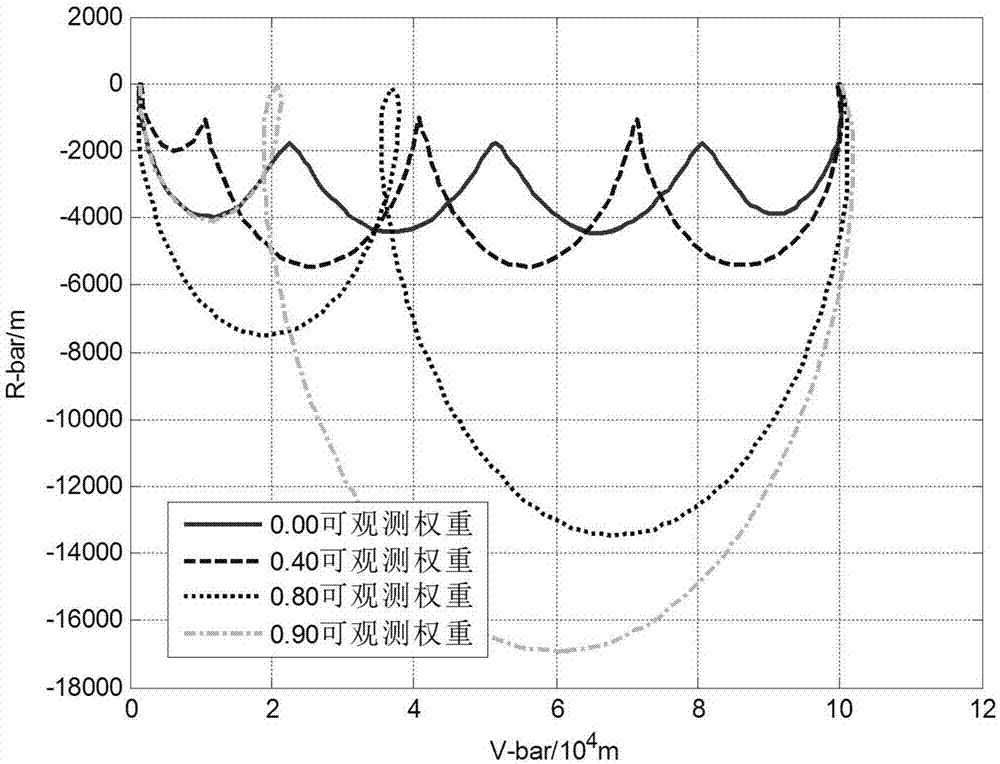
[0049] see Figure 1-8 , the present invention is based on the closed-loop convex optimization optimal rendezvous guidance method of angle-measuring navigation only, comprising the following steps:
[0050] Step 1: Design the performance index; generally speaking, the amount of fuel consumption is proportional to the control quantity, that is, the norm of the maneuver u, so the sum of the norms of all maneuvers can be used as the fuel performance index to reflect the size of the actual fuel consumption:
[0051]
[0052] But this form can't meet the requirement of convex optimization algorithm, so formula (1) is transformed.
[0053] Specifically, the fuel performance index can be expressed as:
[0054] J f =F T Y (2)
[0055] in:
[0056] x, u, s are the system state, control input and slack variables introduced to meet the requirements of the con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More