

CPG (Central Pattern Generator) model-based humanoid robot gait planning method
A humanoid robot and gait planning technology, applied in the field of humanoid robots, to reduce the probability of falling, large stability margin, and improve stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the present invention is not limited to the following specific embodiments.
[0029] A kind of humanoid robot gait planning method based on CPG model, it comprises the following steps:
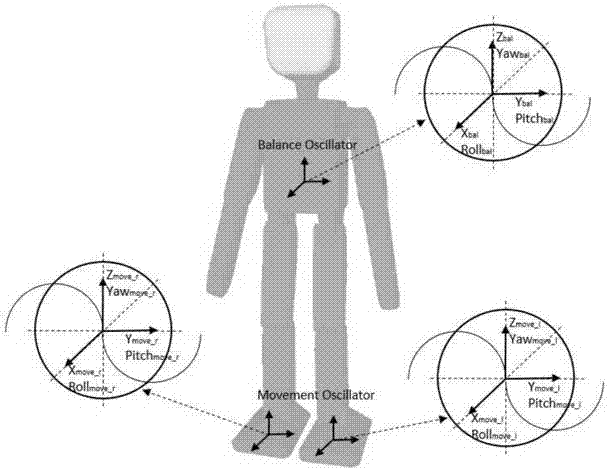
[0030] (1) According to the specific hardware parameters of the robot, the corresponding coupled oscillator model is established:
[0031] OSC s (t) = OSC b (t)+OSC m (t);
[0032] In the formula, OSC m (t) represents the movement trajectory of the ends of the legs relative to the fixed center of mass, that is, the output of the Movement Oscillator; OSC b (t) indicates the trajectory of the center of mass relative to the reference coordinate system, that is, the output of the Balance Oscillator; OSC s (t) is the motion trajectory of the ends of the legs relative to the actual center of mass, that is, the output of the coupled oscillator; the two oscilla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More