

Posture change detection device and method of object clamped by mechanical arm
A posture change and detection device technology, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of incapable of quantitative measurement of posture changes, sensitivity of detection effect to ambient lighting, and influence on the scope of application, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
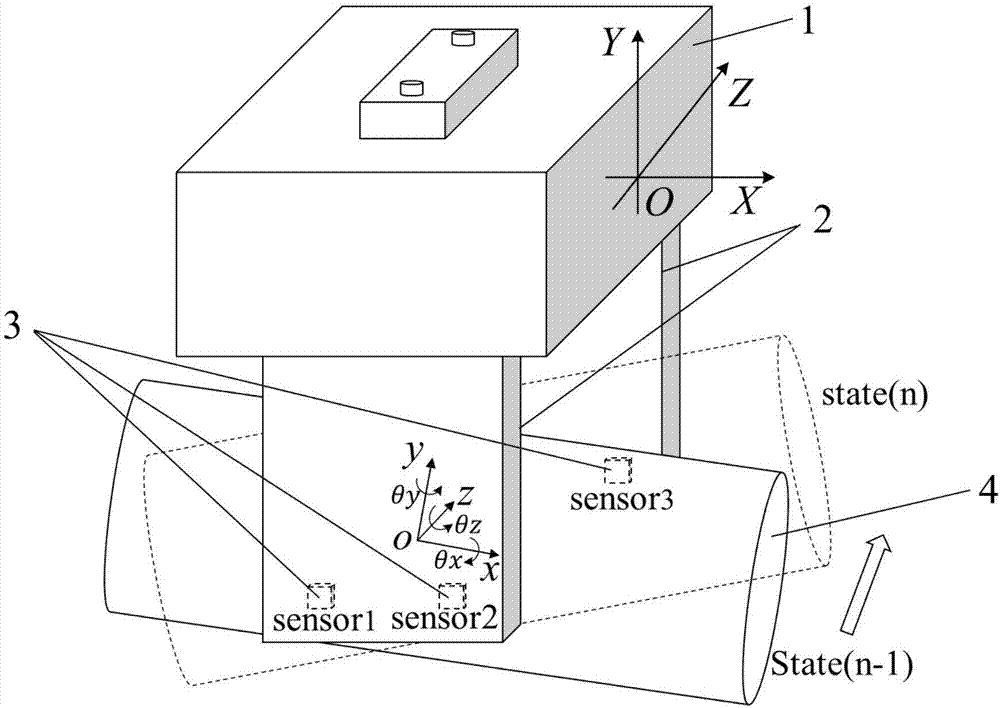
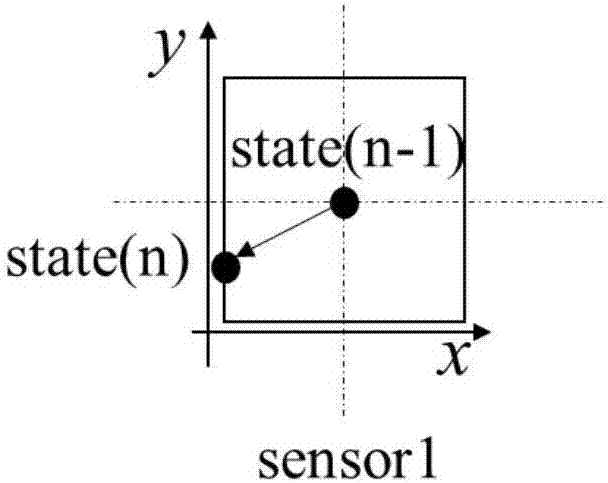
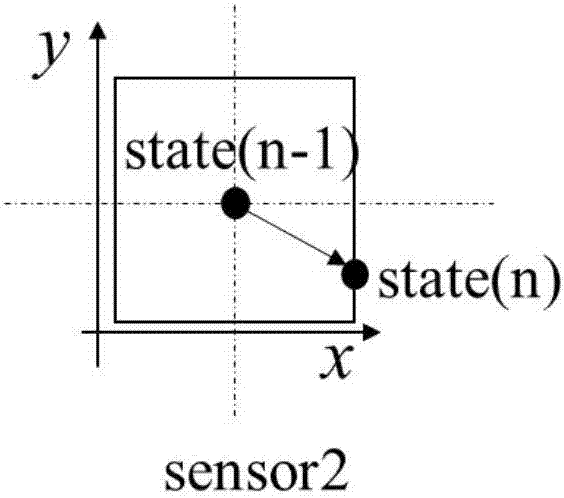
[0076] Such as figure 1 As shown, the detection system designed by the present invention is composed of a manipulator 1 , a manipulator finger 2 , three sliding sensors 3 and a gripped object 4 . Among them, the manipulator 1 and the manipulator finger 2 form a manipulator gripping system; the sliding sensor 3 is three omnidirectional sliding sensors, which can detect both the magnitude of the sliding displacement and the sliding direction. Figure 2(a), Figure 2(b) and Figure 2(c) are schematic diagrams of the detection principles of the sliding sensors sensor1, sensor2, and sensor3, where state(n-1) represents the detection of the three sensors in the current state The coordinates received; state(n) indicates the coordinate changes detected by each sensor when the gripped object and the surface of the mechanical finger slide. In the present invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More