

Sparse direct method-based monocular visual odometry (VO) method of quadrotor unmanned-aerial-vehicle
A technology of visual odometry and direct method, which is applied in image data processing, instrumentation, calculation, etc., and can solve problems such as heavy calculation tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
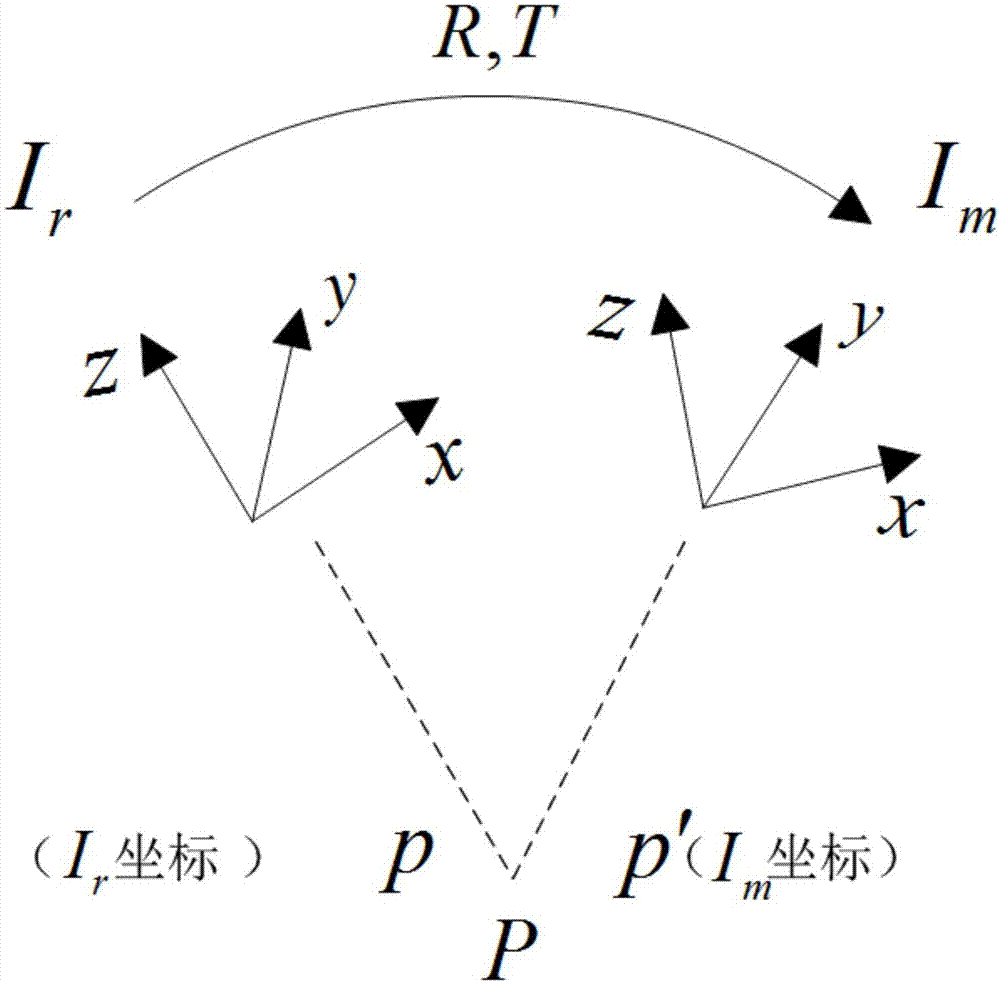
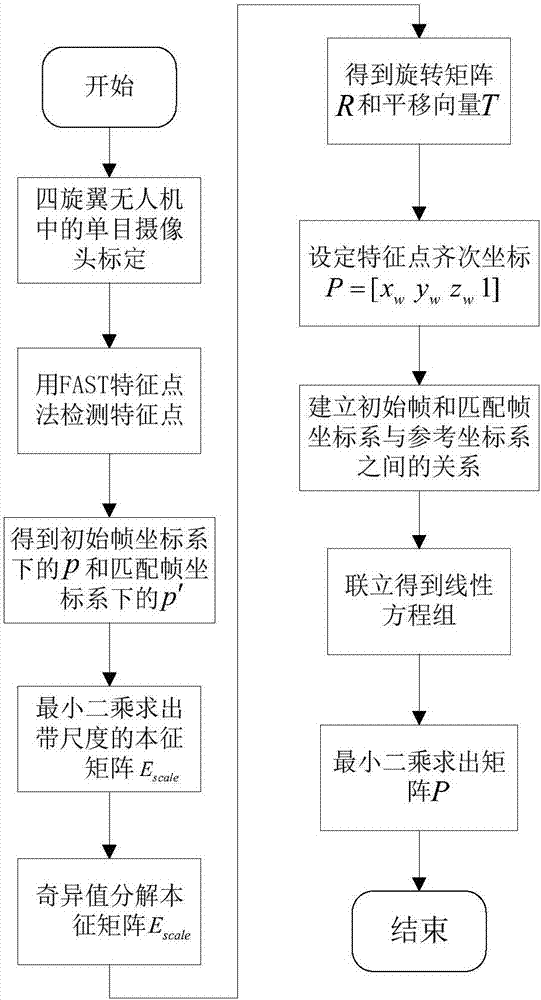
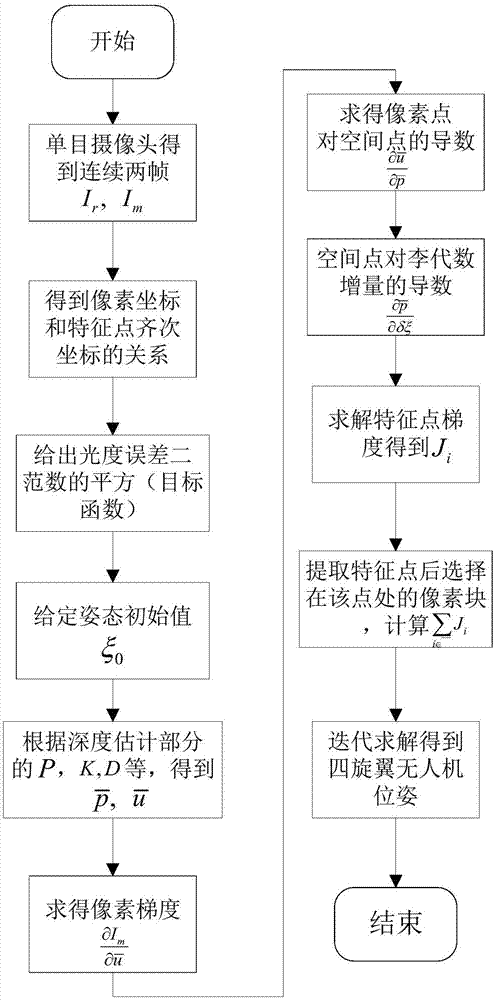
[0055] The monocular visual odometry method of quadrotor UAV based on the sparse direct method is characterized in that: depth estimation is performed for the key frame: the feature point of the key frame is determined by the feature point method, and the intrinsic matrix between two adjacent frames is calculated , decompose the intrinsic matrix and calculate the rotation matrix and translation matrix between two adjacent frames to obtain the extrinsic parameter matrix, and then calculate the depth of the feature point according to the triangulation method; after obtaining the depth value of the feature point, solve the quadrotor by the sparse matrix direct method The pose of the drone, motion estimation for all frames: extract sparse feature points, use the direct method to calculate the position of each feature point in the next frame, and use the grayscale of each pixel in a fixed-size pixel block around the feature point The information is optimized to obtain the motion pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More