

Path planning method and system for mobile robot
A mobile robot and path planning technology, applied in the field of mobile robots, can solve the problems of unsatisfactory path optimization, large resources and practice, low efficiency, etc., to avoid local minimum point "deadlock, reduce the amount of data calculation, and improve efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
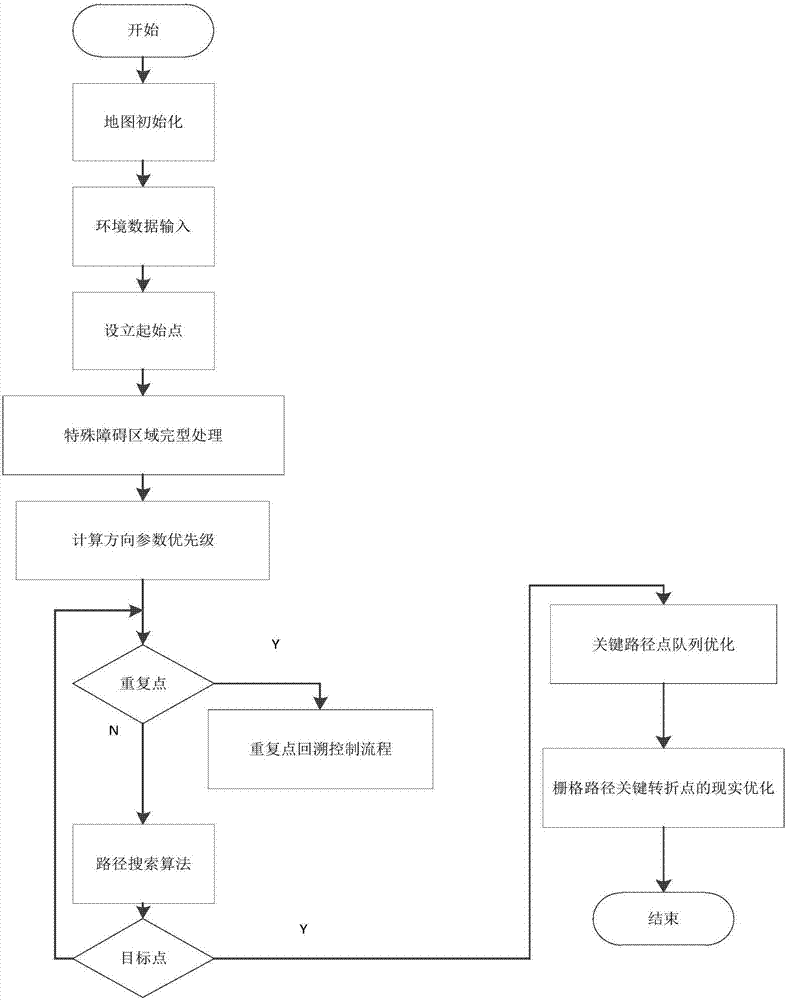
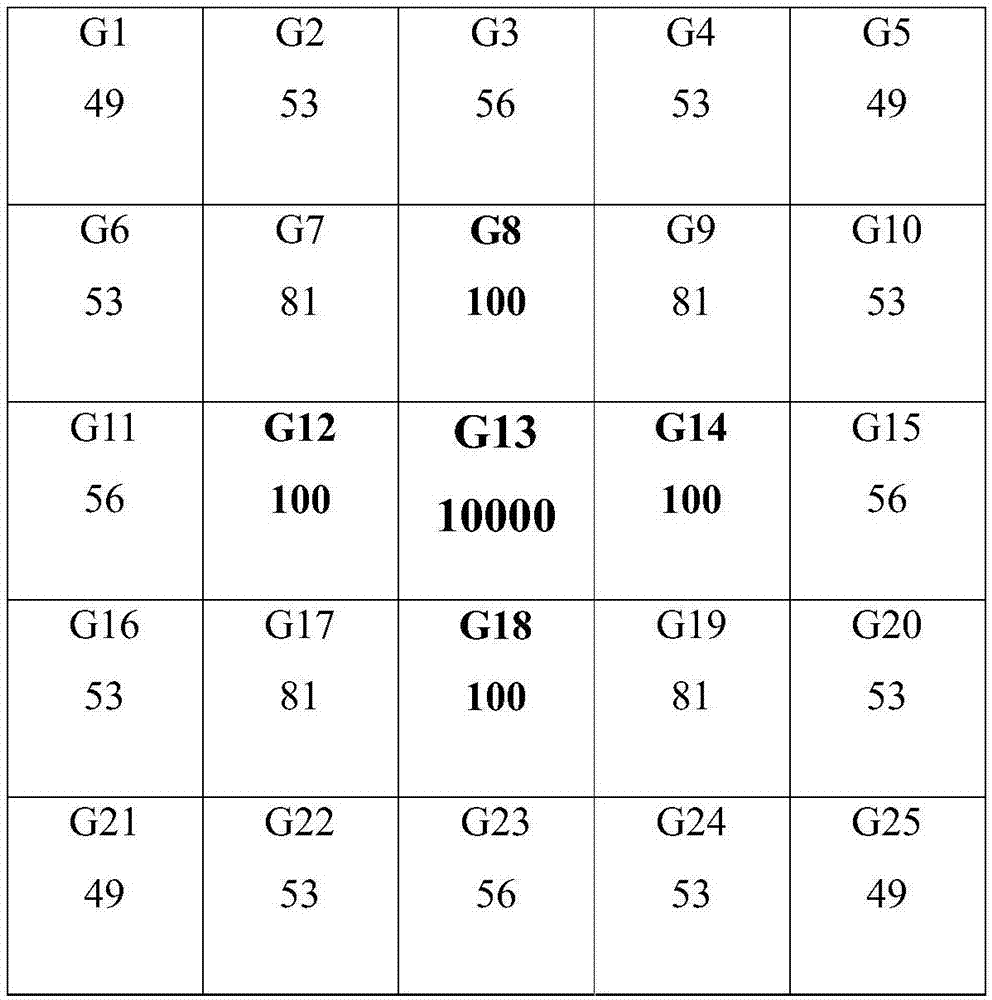
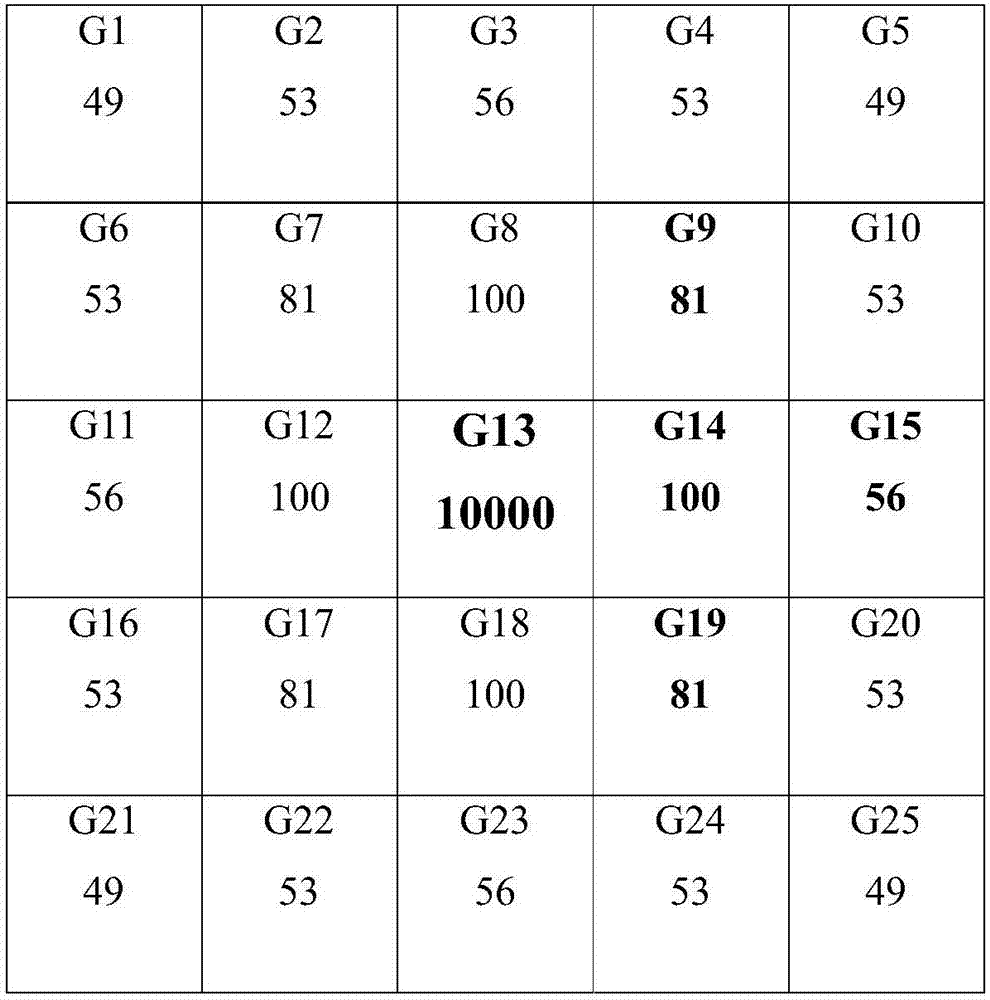
[0062] According to the mobile robot path planning method provided by the present invention, it includes: establishing a map according to the travel environment data of the mobile robot; dividing the map into a plurality of uniform grids to obtain an initial grid map, wherein each of the initial grid maps The grid corresponds to a corresponding assignable element in the initial grid matrix; determine the starting position and end position of the mobile robot on the initial grid map; receive the obstacle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More