

Attitude determination system and method of small unmanned aerial vehicle
A technology of aircraft attitude and unmanned aerial vehicle, which is applied in the field of small unmanned aerial vehicle attitude determination system, and can solve the problems of attitude determination which is not suitable for small unmanned aerial vehicle, large amount of calculation of filtering algorithm, complicated algorithm and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described in detail below with reference to the drawings and embodiments.
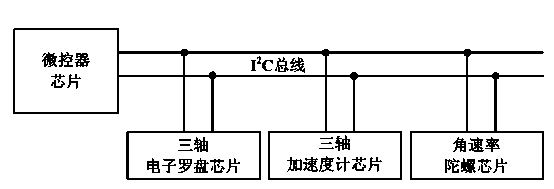
[0056] See figure 1 The present invention designs a small UAV attitude determination system, which includes three attitude measurement devices: an angular rate gyro chip is used to measure the angular velocity of the UAV, and a three-axis electronic compass chip is used to measure the yaw angle of the UAV, The three-axis accelerometer chip is used to measure the component of gravity in the UAV body coordinate system. In addition, the system also includes a micro-controller chip, which is used to collect the measurement data of the attitude measurement device and execute the attitude determination algorithm method of the present invention to determine the attitude of the drone. Microcontroller chip, angular rate gyro chip, three-axis electronic compass chip and three-axis accelerometer chip pass I 2 C bus for communication. The micro-controller chip uses multip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More