

Multi-motion-mode pipeline outer wall climbing detection robot
A pipeline outer wall and robot technology, which is applied in the field of multi-motion mode pipeline outer wall climbing detection robots, can solve the problems of not being able to adapt to variable pipe diameters, switching motion pipes, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
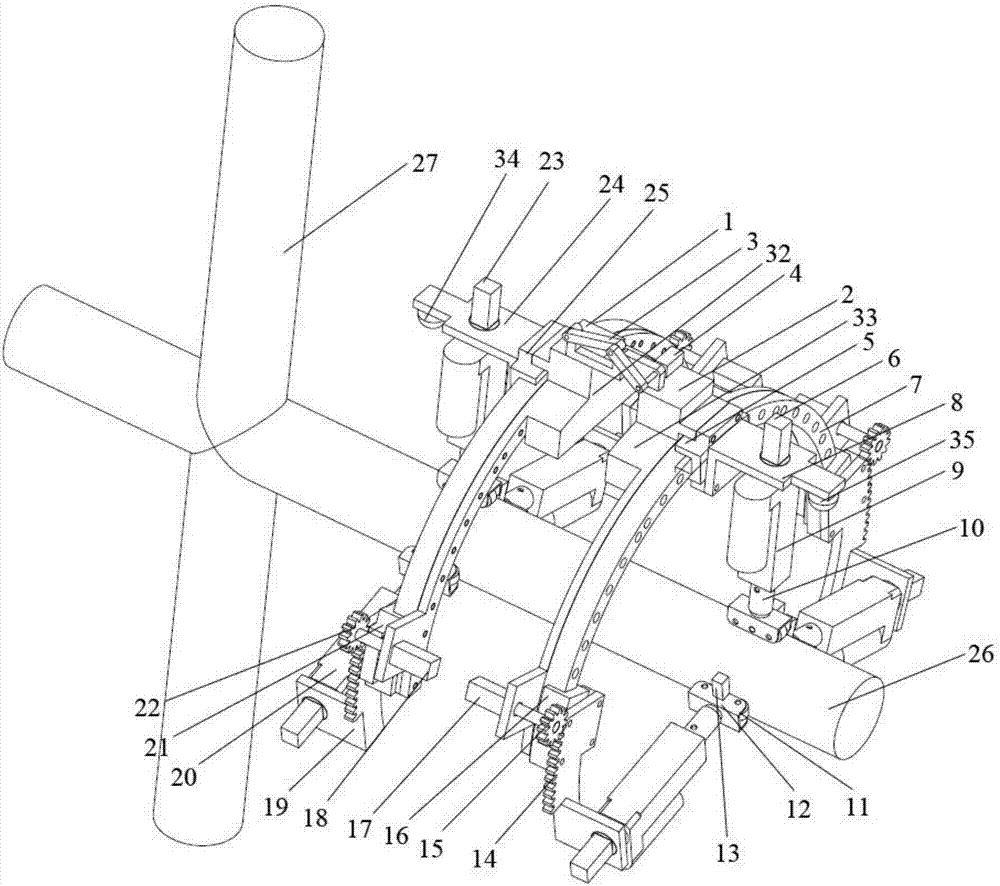
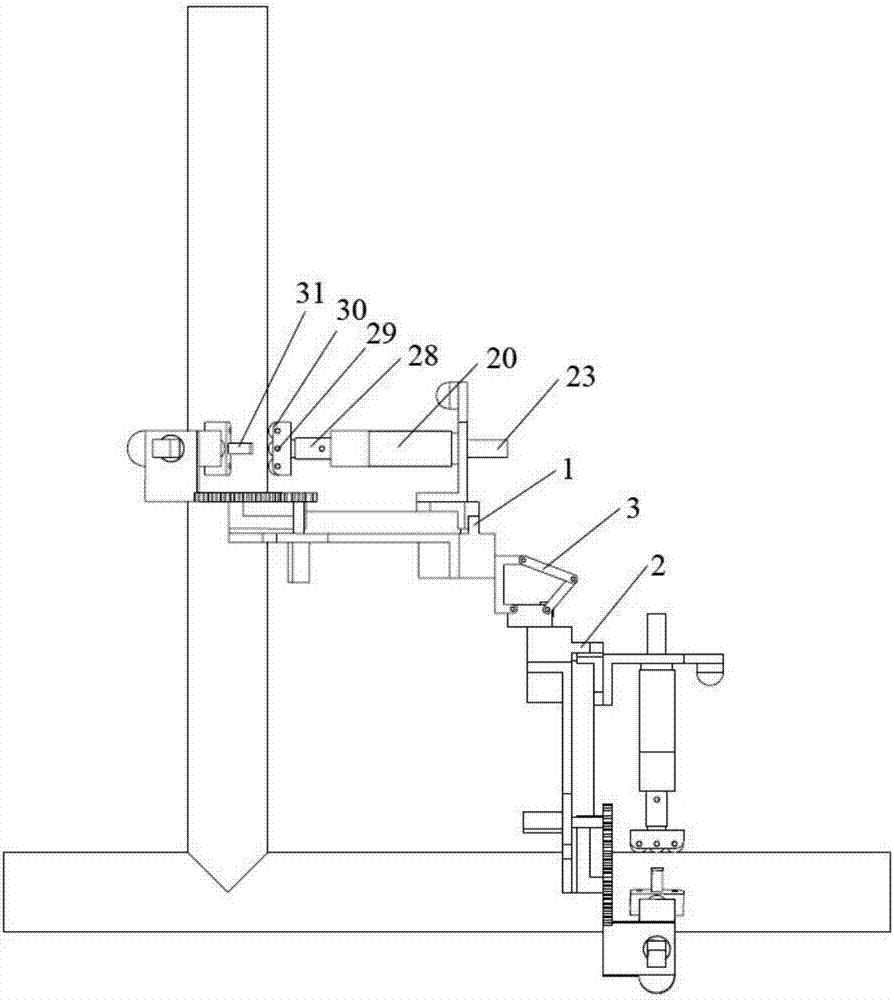
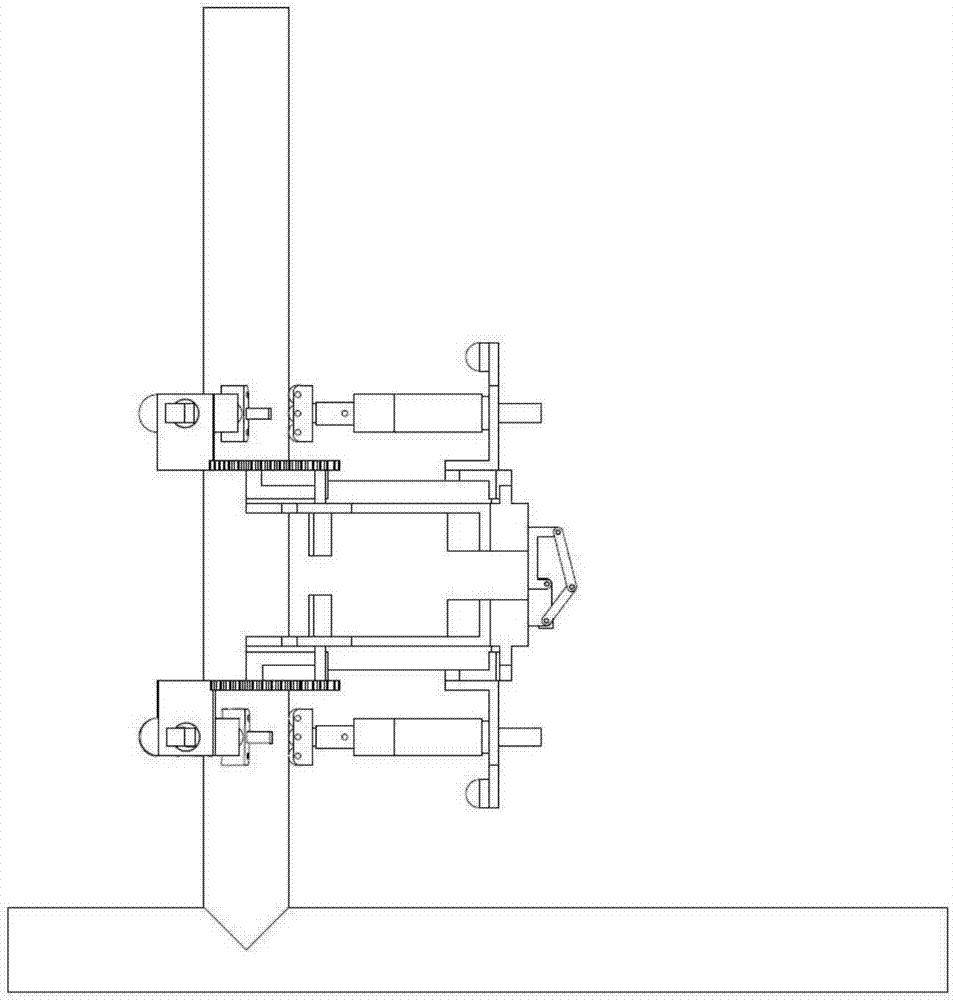
[0034] The multi-motion mode pipe outer wall climbing detection robot of the present invention is composed of two large circular modules as a whole, and each circular module is composed of three grippers with drive wheels, so it can be better realized in cylindrical pipes. movement of the surface. The design of the driving wheel steering device, the design of the adjustment device adapting to different pipe diameters and the design of the turning motion of the main frame module enable it to adapt to pipes with complex shapes of different diameters and to cross obstacles on the pipes. capacity of adjacent pipelines.
[0035] Such as figure 1 As shown, a multi-motion mode pipeline outer wall climbing detection robot is composed of two circular modules, and the two circular modules are connected by an overturning device. Each circular module is composed of driving device, transmission device, steering device, camera, pressure sensor and control box, etc. The two circular modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More