

Complex space obstacle crossing robot
A robot and space technology, applied in the field of inspection robots, can solve the problems of complex weight and operation, easy to roll over, and reduce its own size, etc., and achieve the effects of being easy to carry on board, light in weight, and reducing in cross-sectional area.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The embodiment of the present invention will be described in further detail below in combination with the accompanying drawings.
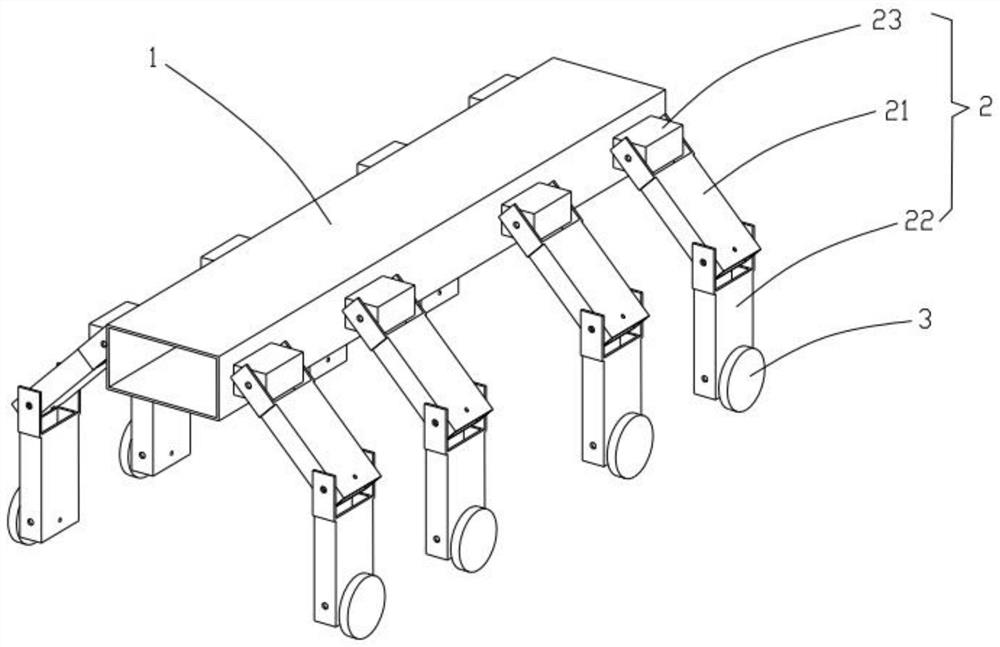
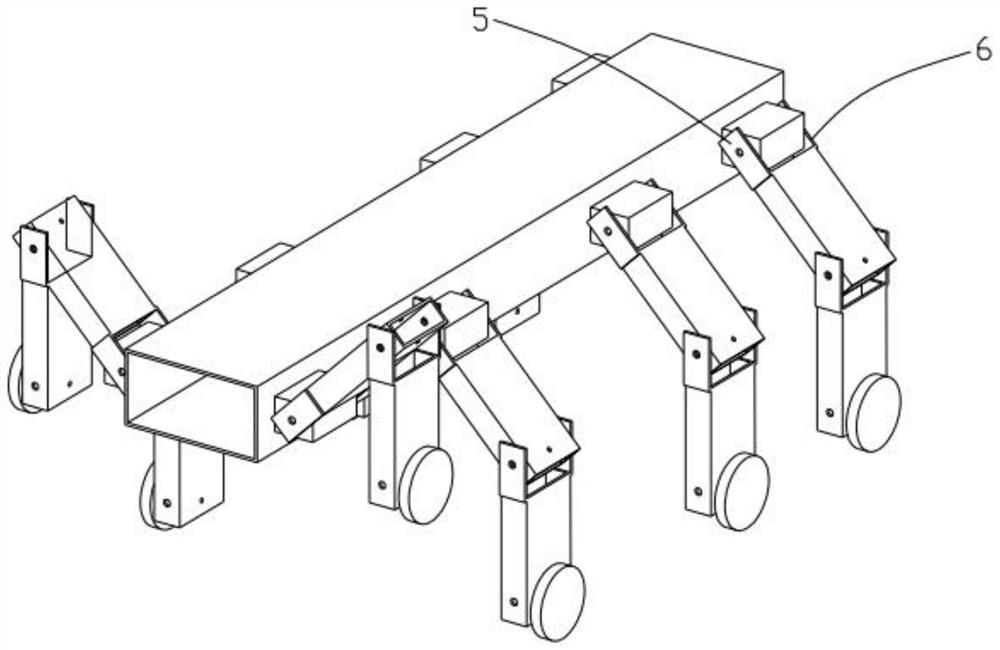
[0023] reference Figures 1 to 4 , the obstacle crossing robot provided by the invention comprises a fuselage 1 extending along the horizontal direction and a long-distance travel mechanism 2 symmetrically arranged on both sides of the length direction of the fuselage 1. The number of long-distance travel mechanisms on each side is at least 3, and the long-distance travel mechanism 2 is arranged at intervals along the length direction of the fuselage.
[0024] The long travel mechanism 2 includes a first leg 21, a second leg 22, a first angle adjustment mechanism and a second angle adjustment mechanism. The head end of the first leg 21 is rotatably connected with the body 1, the end of the first leg 21 is rotatably connected with the head end of the second leg 22, and the end of the second leg 22 is provided with a driving motor (not shown in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More