

Robust control method for base attitude of space robot
A space robot and robust control technology, applied in attitude control, aircraft, motor vehicles, etc., can solve problems such as disturbance and uncertainty, and achieve the effect of low complexity and guaranteed performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0031] The invention provides a robust control method for the posture of a space robot base, comprising the following steps:
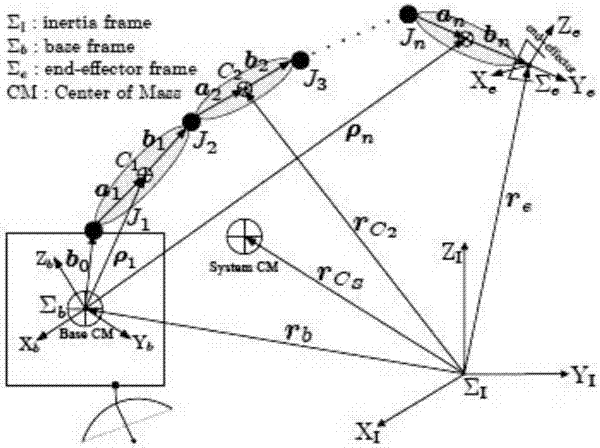
[0032] Step 1, based on the Lagrangian equation to establish the dynamic equation of the attitude of the base of the space robot; specifically, when the active force of the space robot is non-zero, the dynamic equation of the space robot;
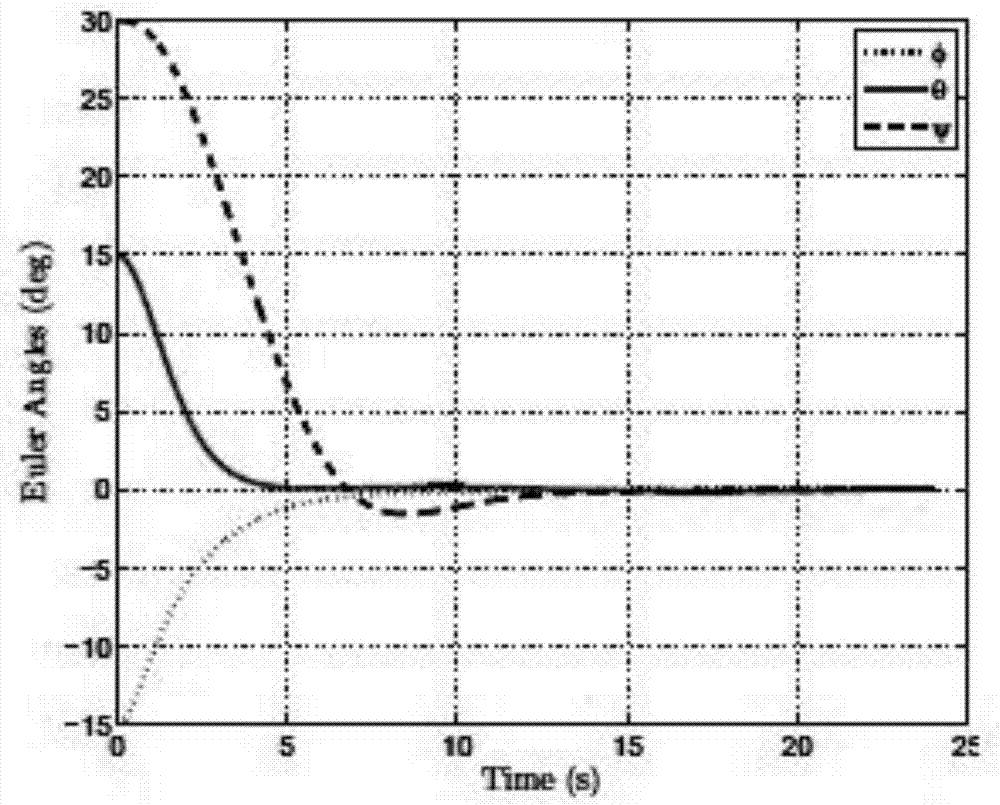
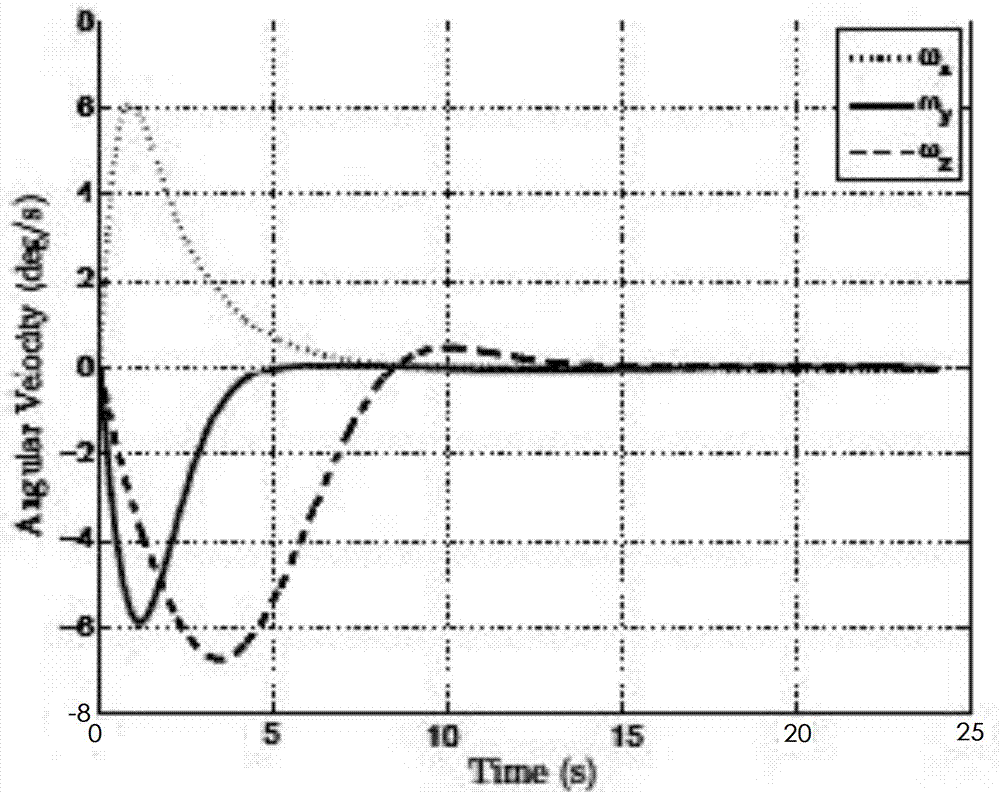
[0033] Step 2, use the reaction force and moment caused by the mechanical arm of the space robot as the active force of the space robot, and set up a robust controller to adjust the attitude of the base of the space robot; specifically include:
[0034] Step 2.1, setting the performance function of the robust controller, the specific process includes: the attitude tracking deviation of the base is e(t)=q-q d , the derivative is Build the extended state ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More