

A laser distance measuring sensor calibration method
A technology of laser ranging and calibration method, applied in the field of robot calibration, to achieve the effect of accurate calibration results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts fall within the protection scope of the present invention.
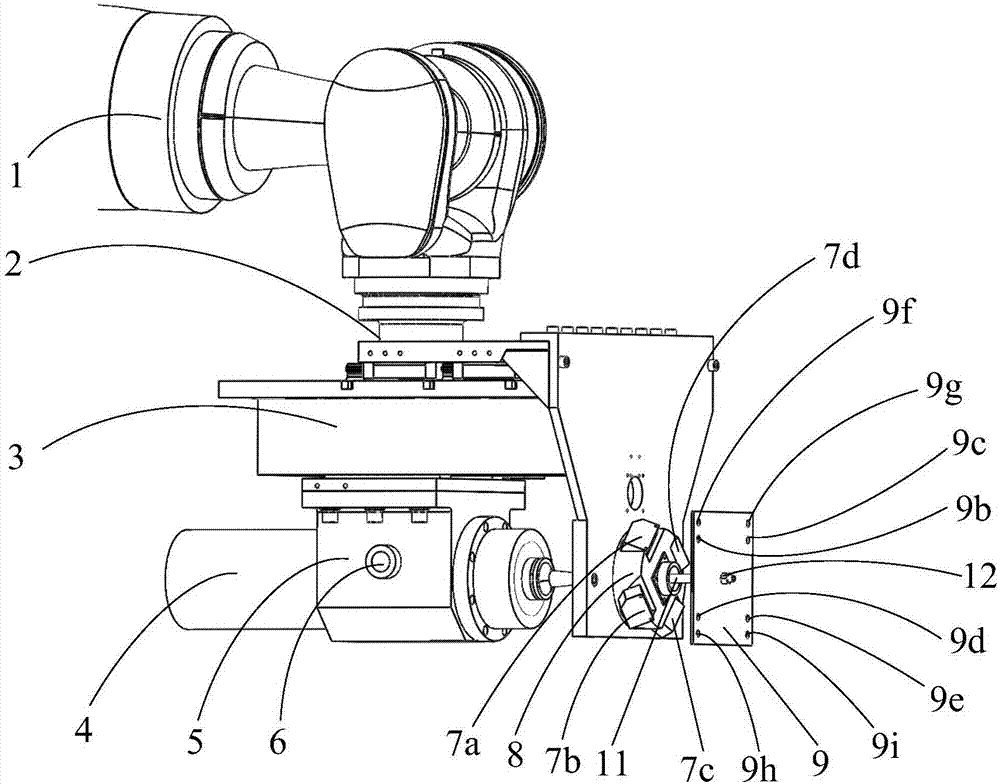
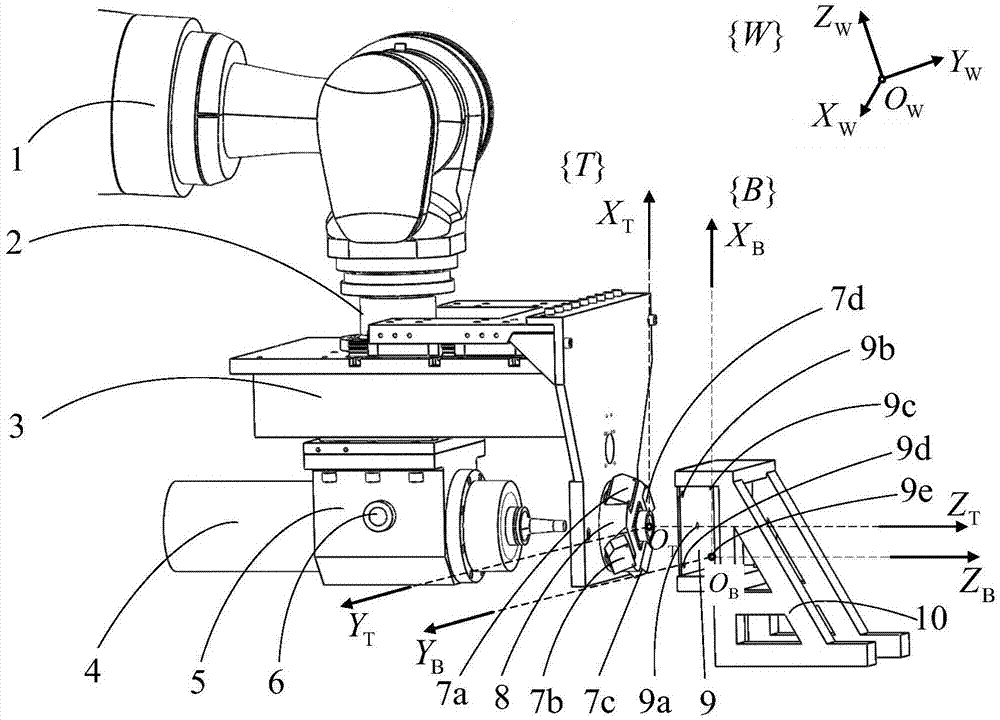
[0038] see figure 1 and figure 2As shown, the device used in the method of the present invention includes a laser tracker, an industrial mechanical arm 1, a flange 2, a hole-making end effector, a calibration rod 11, a plane calibration plate 9 and a mounting frame 10, wherein the hole-making end effector It mainly includes a feed module 3, an electric spindle 4, an electric spindle mounting seat 5, a large target ball seat 6, a small target ball seat 12, a pressing head 8, and four laser distance measurin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More