

A hand-eye coordination method for a dual-arm robot based on multi-eye vision
A robot hand and multi-eye vision technology, applied in the field of robot vision, can solve the problems of blind spots of target objects, binocular cameras cannot capture target objects at the same time, and mechanical arm grasping failures, etc., so as to improve the probability of successfully capturing the target and improve Accuracy, the effect of solving visual blind spots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
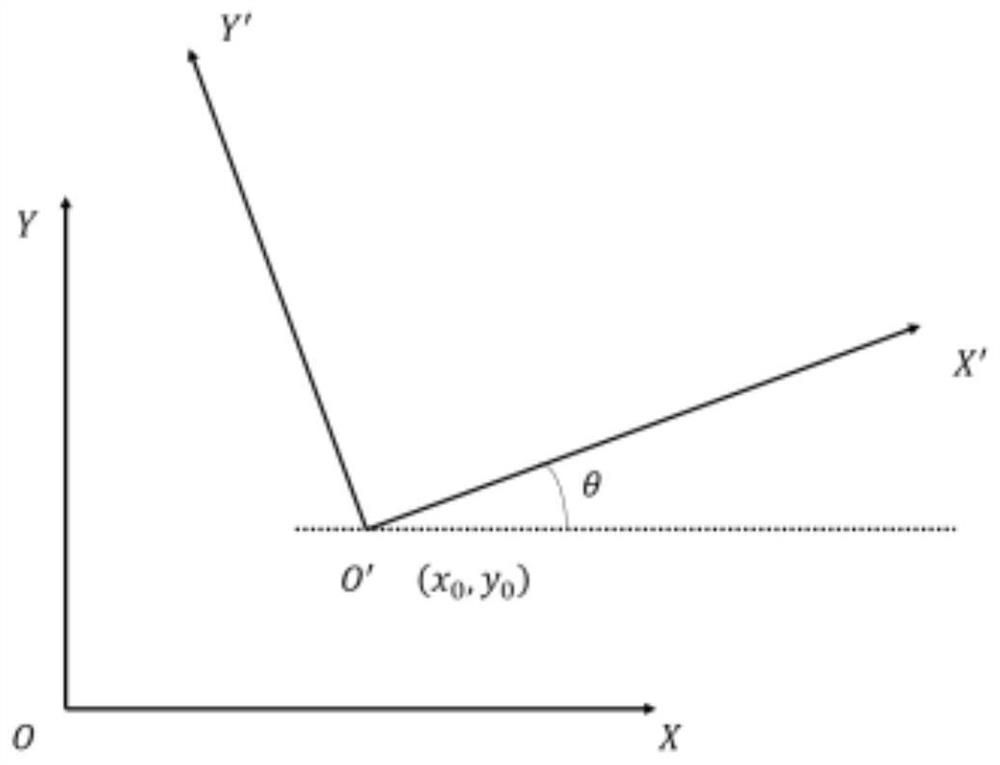
[0072] Such as Figure 4 As shown in Fig. 1, a stereo vision model of two cameras with random positions is established, and two single cameras are randomly placed. In the traditional binocular system, the world coordinate system is set on a camera coordinate system to reduce the amount of calculation, but in the present invention, the camera that collects the image is unknown, so it is meaningless to set the origin of the world coordinate system on the camera coordinate system , so the present invention establishes a world coordinate system with the end of any robot arm as the origin.
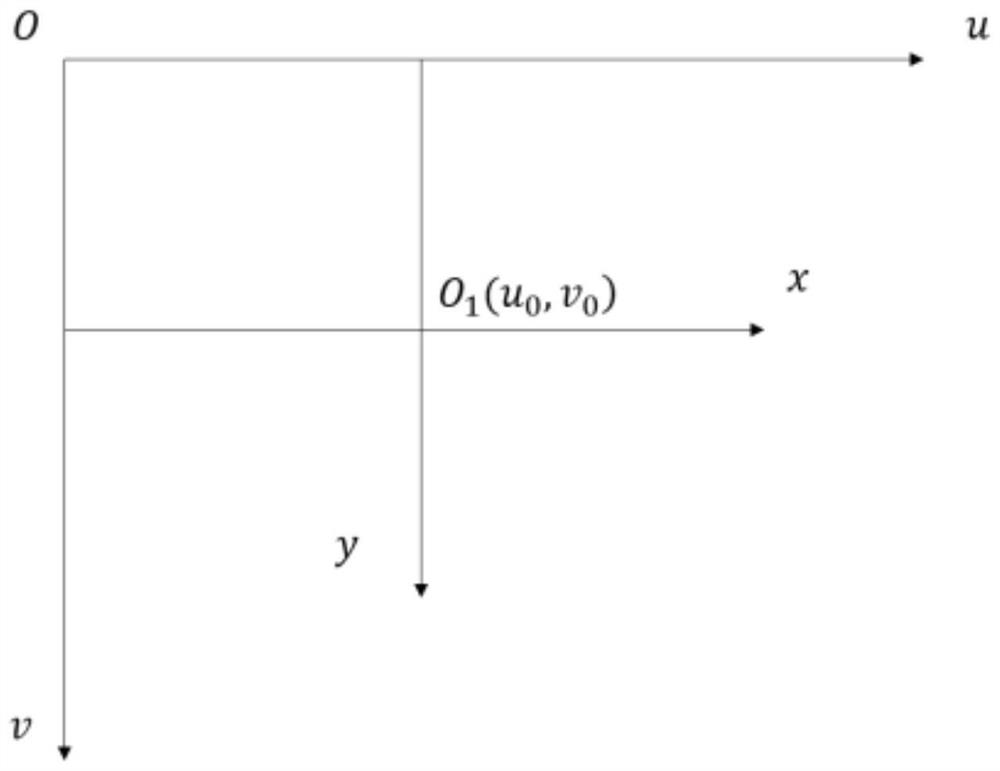
[0073] The two images with target features used in this embodiment are taken by two cameras on the same robotic arm, and the end of the robotic arm is used as the origin of the world coordinate system, then according to the image coordinate system of the target object p in the two images respectively The coordinates (x, y) in the coordinates (x, y) of the target object p in the two camera coor...
Embodiment 2
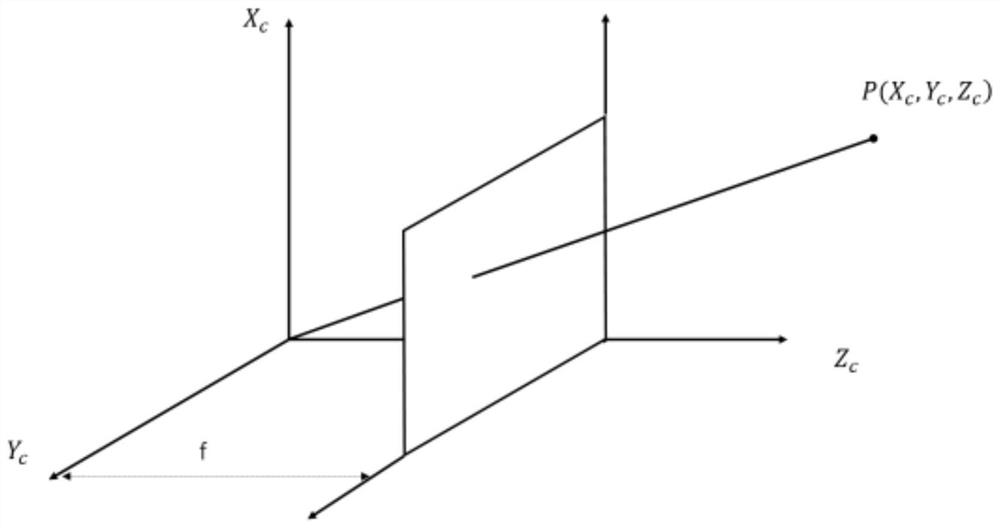
[0077] The two images with target features used in this embodiment are captured by the cameras on the two mechanical arms respectively, and one of the images is captured by the camera on the mechanical arm that establishes the world coordinate system, then the target object is in the camera coordinate system The relationship between the coordinates in and the coordinate system in the world coordinate system is:
[0078]
[0079] The other picture comes from another robot arm, at this time the matrix M=M 2 T 1 T 2 T 3 , where T 1 Indicates the transformation matrix from the end of another robot arm to the base, T 2 Denotes the transformation matrix between the bases of the two manipulators, T 3 Indicates the transformation matrix from the base of the manipulator establishing the world coordinate system to the end of the manipulator, M 2 Indicates the transfer matrix from the camera on the robotic arm of the world coordinate system to the end of the robotic arm, then th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More